PROJEKT DO MMIA - AKCELEROMETR
Lukáš Famfulík, Martin Fabián, UREL, FEEC, VUT
Brno

Úvod
Jedná se o součástku, která je schopna měřit zrychlení a převádět jeho velikost na elektrický signál. Akcelerometr je schopen měřit zrychlení ve všech třech osách (XYZ). Dokáže měřit statické i dynamické zrychlení. Statické zrychlení je všudy přítomné tíhové zrychlení a dynamické zrychlení je způsobeno změnou rychlosti pohybu. Vše je realizováno pomocí MEMS technologie a zapouzdřeno v miniaturním SMD pouzdře. Právě díky tomu se dnes nachází v řadě mobilních telefonů a komunikátorů jako orientační senzor nebo v zařízeních citlivých na otřesy jako například PDA a podobně (měření dynamického zrychlení). Další uplatnění se nachází v robotice a automatizaci. V této konstrukci je použit akcelerometr MMA7455L, který je tříosý v LGA pouzdře s měnitelnými rozsahy maximálního zrychlení od 2g do 8g a digitálním výstupem přes SPI a I2C rozhraní.
Realizace
· Akcelerometr komunikuje s jinými zařízeními (většinou s mikroprocesorem) pomocí sběrnice SPI (Serial Peripheral Interface – seriové periferní rozhraní). Sběrnici SPI původně vyvinula a používala ve svých obvodech firma Motorola. Dnes je již běžnou součástí velké řady mikroprocesorů mnoha výrobců.
· SPI sběrnice je tvořena 3 vodičovou synchronní sériovou linkou. Vodiče CLK, MISO a MOSI (řídicí signál, master vstup slave výstup a master výstup slave vstup). Na sběrnici vždy jedno zařízení řídící komunikaci (režim master). Ostatní zařízení jsou podřízená (režim slave) a může jich být teoreticky připojeno neomezené množství (prakticky je omezení délkou sběrnice, maximálním odběrem a kapacitou vstupů). K adresaci slouží 4. vstup, který povoluje komunikaci. Ke každému podřízenému zařízení vede samostatný vodič od nadřízeného zařízení.
· Samotný přenos dat probíhá obousměrně v taktu s řídícím hodinovým signálem CLK. Na lince MISO zvolené podřízené zařízení vysílá a na lince MOSI vysílá procesor. Odesíláno je buď 8bitové nebo 16 bitové slovo. Tímto končí obecný popis, protože výrobce si většinou vytváří vlastní komunikační protokol.
· Obvod akcelerometru je vždy podřízené zařízení. Pin CLK je vstupní a slouží k synchronizaci odesílaných i přijímaných dat. Maximální podporovaná full-duplexní přenosová rychlost je 2,5 Mbps. Za jednu periodu hodinového signálu může dojít k přenesení 1 bitu.
· Data jsou odesílána po rámcích. Jeden rámec má délku 2-byte a MSB (nejvýznamnější bit) je odesílán jako první. Linka MISO slouží k přenosu dat z akcelerometru. Odeslání bitu probíhá s nástupnou hranou hodinového impulzu. Příjem data akcelerometrem probíhá přes linku MOSI. Uložení bitu dochází s nástupnou hranou hodinového impulzu. Odesílaná odpověď na požadavek je vždy opožděná o jeden vysílací rámec.
· Volba komunikujícího obvodu se určuje vstupem CS. Jeden rámec je ohraničen periodou na vstupu CS. Každá perioda začíná sestupnou hranou a končí vzestupnou hranou CS. Obvod přijímá a odesílá data jedině pokud je úroveň na CS log. 0.
· Přes SPI rozhraní můžeme přistupovat k 28 registrům. Seznam všech registrů je k nalezení v dokumentaci. Pomocí 28 registrů se obvod ovládá nebo se zjišťují naměřené hodnoty. Jedna
· Akcelerometr je realizován na
vývojové desce s mikroprocesorem AVR - ATmega16 od firmy Atmel.
Komunikace se senzorem :
- CPHA=1,CPOL=0, DORD=1
- data jsou odesílána od LSB do MSB a jsou přenášeny při sestupné hraně
- SPR, SPI2x nastaveno dle uživatelské definice v definiční části
- nastavení portu pro větší univerzálnost se bude provádět podle definiční části, pro Atmega16:
- CLK PB7
- MISO PB6
- MOSI PB5
- SS PB4
- v případě potřeby umožňuje přípravek generovat externí přerušení dle uživatelského nastavení, k tomuto účelu byl použit port D, využity piny PD3 a PD2 pro generování INT0 a INT1
- inicializace SPI a portu vykonává funkce akcel_init ()
- čtení a odesílání dat přes SPI rozhraní vykonává funkce SPI_SR (), která se volá s odesílanými daty a adresou registru do kterého se mají data uložit
- základní parametry komunikace jde změnit v definiční části programu
Vývojová deska obsahuje [1]:
- mikroprocesor ATmega 16
- 4 řádkový displej, PORT A
- segmentový displej, PORT A
- klávesnice 4x4, PORT B
- 2x8 vstupně-výstupních portů, PORT C
- reproduktor, PORT D
- 4 LED diody, PORT D
- 4 tlačítka, PORT D
- tlačítko RESET
- deska je připojena pomocí USB a napájena +12V
Závěr
Stále klesající cena a zlepšující se přesnost
akcelerometru umožnuje
jejich používání v amatérských zařízeních.
Výsledkem aplikace muže být např.
digitální vodováha. Pomocí výsledného akcelerometru se nám
podařilo změřit dynamické zrychlení způsobené změnou
rychlosti pohybu akcelerometru. Výsledky zrychlení jsou zobrazovány na LCD
displeji jako rav data. Aplikaci na měření
statického můžete vidět v práci [4] a [5] v podobě
digitální vodováhy
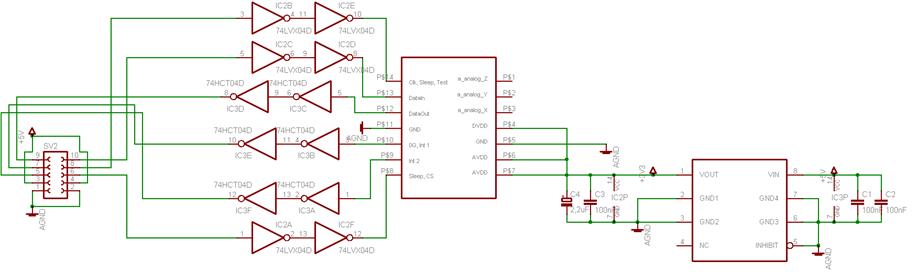
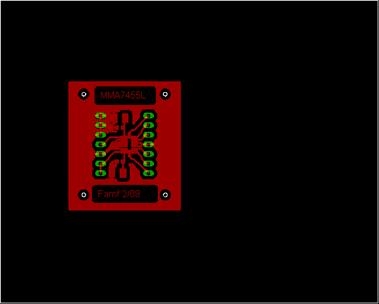
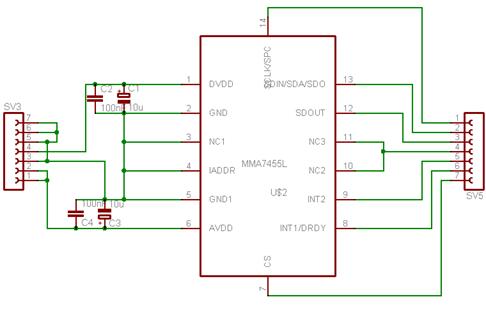
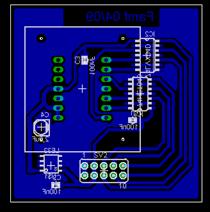
DPS a Schémata
Literatura
[1] Frýza T.,
Laboratoře v předmětu Mikroprocesorová technika
[2] http://www.freescale.com/files/sensors/doc/data_sheet/MMA7455L.pdf?fpsp=1
[3] http://www.atmel.com/dyn/resources/prod_documents/doc2466.pdf
[4] http://www.radio.feec.vutbr.cz/fta09/vysledky/famfulik.pdf
[5] FAMFULÍK, L. Digitální kyvadlový
inklinometr. Brno: Vysoké učení technické v Brně,
Fakulta elektrotechniky a komunikačních technologií,
2008. 39 s. Vedoucí bakalářské práce
Ing. Viera Biolková.