Elektronický kompas
Tomáš Lembard, UREL, FEEC, VUT Brno
xlemba00 stud.feec.vutbr.cz
stud.feec.vutbr.cz
Obsah:
- Úvod
- Realizace
- Závěr
- Literatura
Cílem projektu je ověření možností měření magnetického pole pomocí senzoru magnetického pole KMZ52 a následné vytvoření prototypu zařízení
pro měření mag. pole Země ze kterého pak lze určit azimut, tj. elektronická verze kompasu.
K měření mag. pole je použit integrovaný obvod KMZ52. Pro měření azimutu je potřebat měřit intenzitu mag. pole ve dvou osách, ose x a y.
Porovnáním velikostí intenzit z jednotlivých směrů lze poté zjistit azimut. Jedná se o magnetorezistivní senzory. Senzor je složen z
odporového můstku vytvořeného z materiálu, který mění odpor v zavislosti na intenzitě mag. pole. Výstupem z tohoto můstku intenzita mag. pole
převedena na diferenční napětí.
Zapojení:
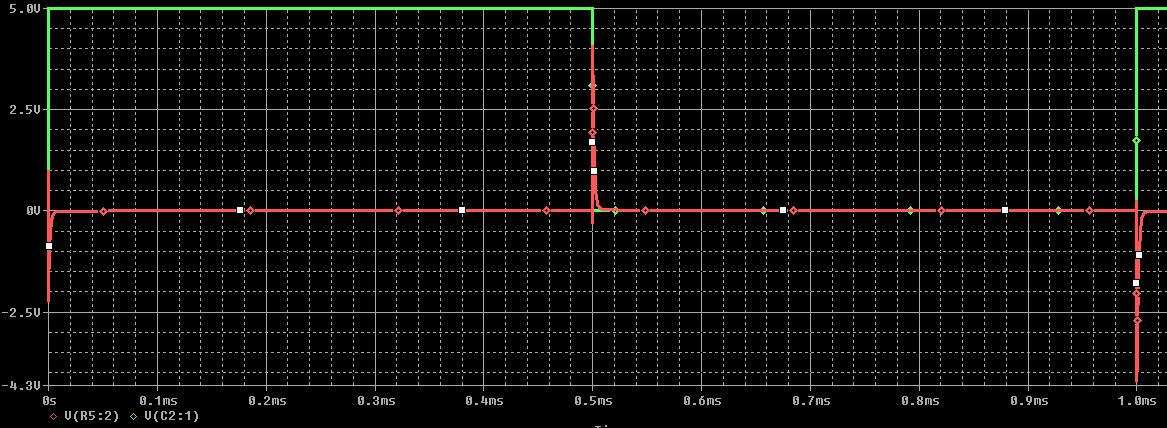
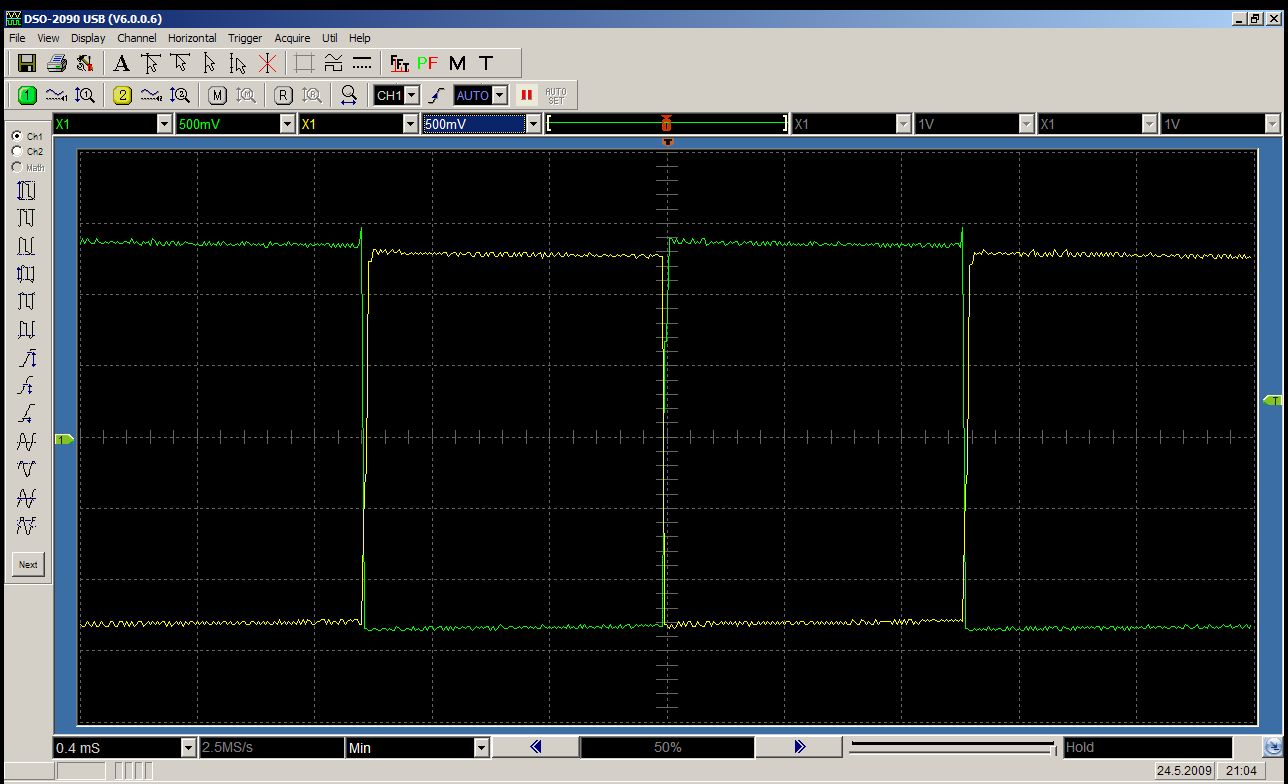
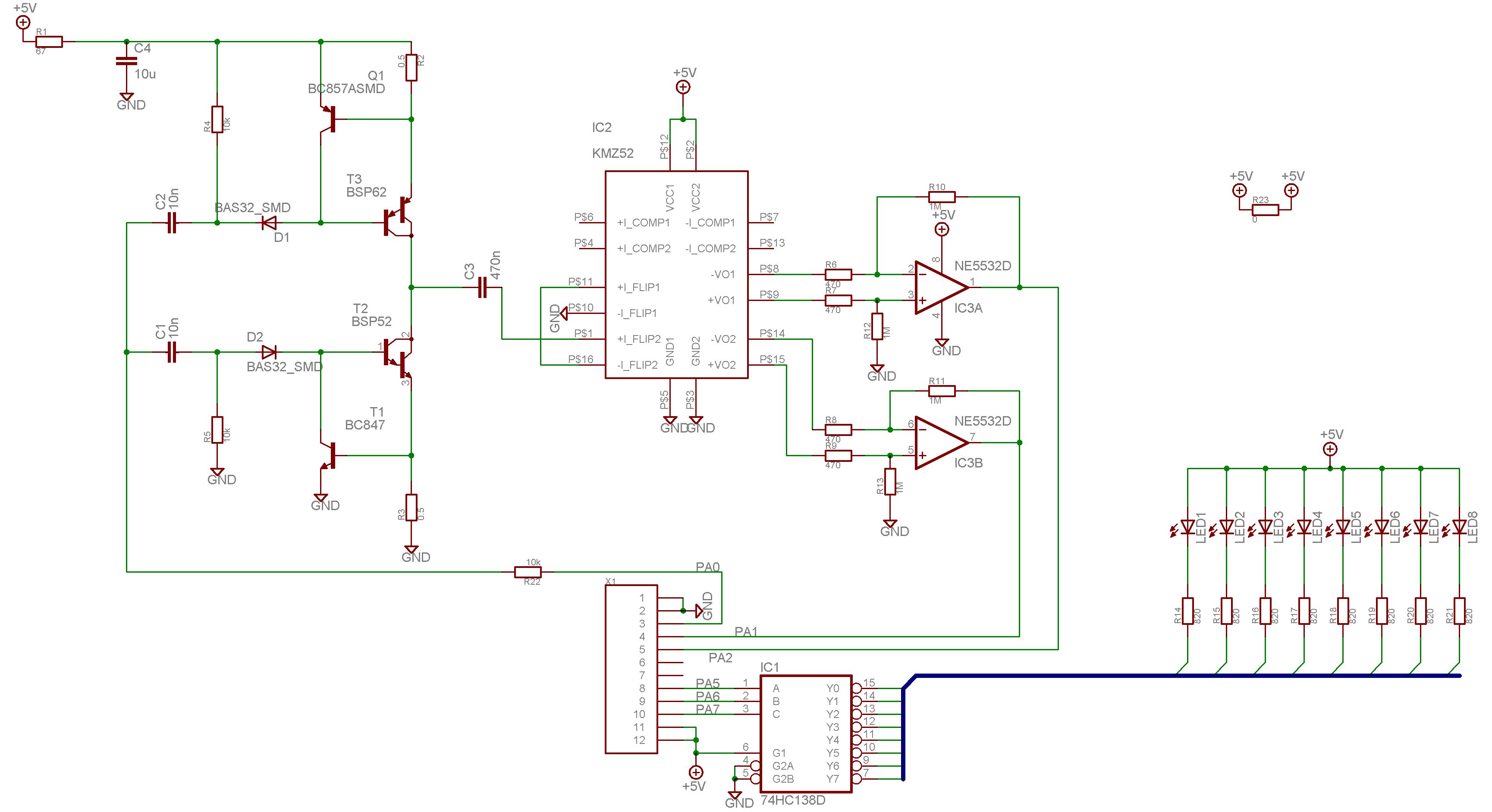 Jelikož je výstupní diferenční napětí senzoru velmi slabé, cca 1,5 mV je potřeba připojit na výstup operační zesilovače v zapojení typu diferenční zesilovač, kde je velikost zesílení dána poměrem velikostí odporů. Další nutnou podmínkou je kompenzace offsetu senzoru, neboť ten je několikanásobně větší než vlastní užitečný signál. Kompenzace offsetu se provádí pomocí integrované kompenzační cívce umístěné v senzoru. Do této cívky je potřeba pro ideální kompenzaci aby jí proudil po velmi krátkou dobu řádově v nanosekundách proud o velikosti 1A se střídavě se měnící polaritou. Tím, že cívkou prochází proud vytvoří se kolem ní magnetické pole. A tím, že se mění změnou polarity také směr vytvořeného magnetického pole, chyba offsetu se tímto způsobem eliminuje. Časování a spouštění pulzů má na starosti procesor, ktery funguje pouze jako generátor "taktovacího" signálu. Funkce lze lépe vidět z následujícího grafu. Kdy zelený průběh je spouštěcí signál generovaný procesorem a červený průběh odpovídá krátkým pulzům na kompenzační cívce.
Jelikož je výstupní diferenční napětí senzoru velmi slabé, cca 1,5 mV je potřeba připojit na výstup operační zesilovače v zapojení typu diferenční zesilovač, kde je velikost zesílení dána poměrem velikostí odporů. Další nutnou podmínkou je kompenzace offsetu senzoru, neboť ten je několikanásobně větší než vlastní užitečný signál. Kompenzace offsetu se provádí pomocí integrované kompenzační cívce umístěné v senzoru. Do této cívky je potřeba pro ideální kompenzaci aby jí proudil po velmi krátkou dobu řádově v nanosekundách proud o velikosti 1A se střídavě se měnící polaritou. Tím, že cívkou prochází proud vytvoří se kolem ní magnetické pole. A tím, že se mění změnou polarity také směr vytvořeného magnetického pole, chyba offsetu se tímto způsobem eliminuje. Časování a spouštění pulzů má na starosti procesor, ktery funguje pouze jako generátor "taktovacího" signálu. Funkce lze lépe vidět z následujícího grafu. Kdy zelený průběh je spouštěcí signál generovaný procesorem a červený průběh odpovídá krátkým pulzům na kompenzační cívce.
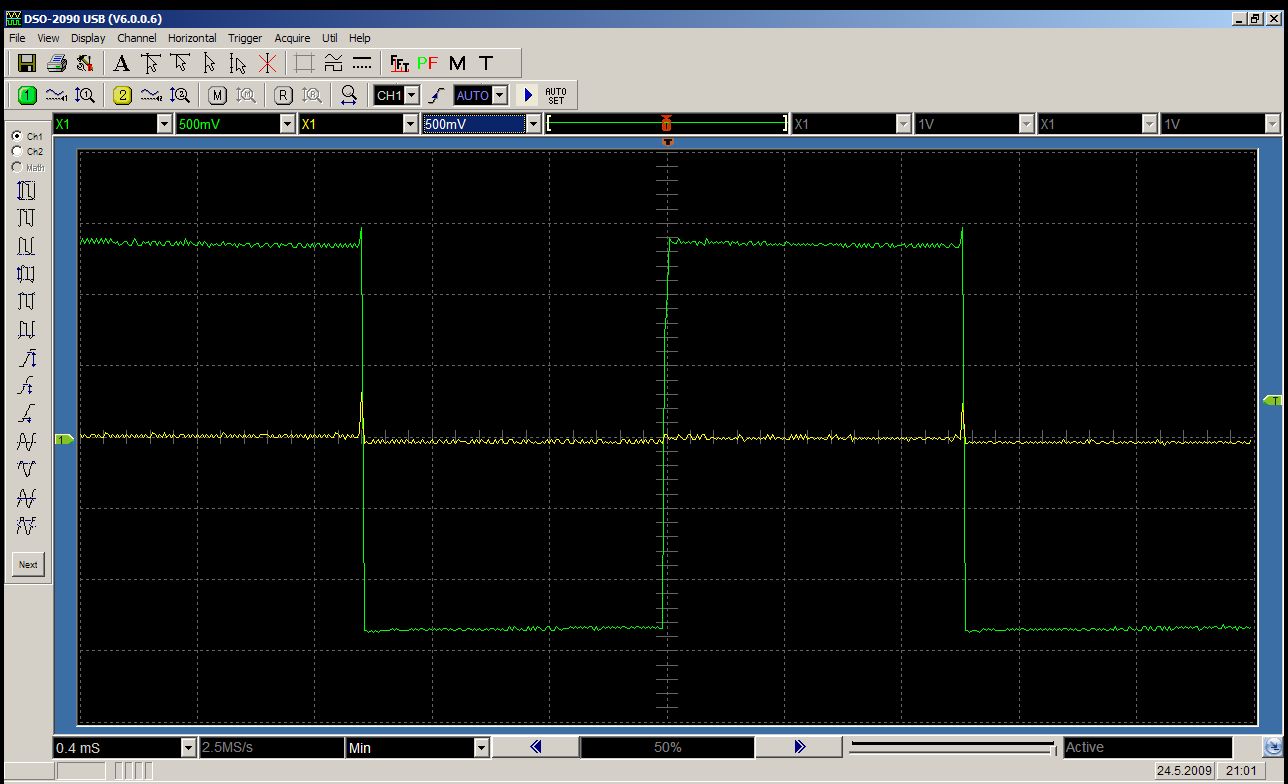
Získání azimutu
Azimut je úhel otočení od severního magnetického pólu, tj. pro sever je azimut 0 stupňů, pro jih 180, atd. Výstupem senzoru jsou 2 analogové signály jejichž velikost je dána úrovní intenzity mag. pole, jsou citlivé osy jednotl. senzorů vzájemně otočeny o 90 stupňů. Porovnáním těchto 2 signálů lze určit azimut. Zřejmé to bude z následujích průběhů signálů pro azimuty sever, severovýchod a severozápad. Zde je průběh signálů pro sever. Osa x je v maximu, osa y je v minimu.
 Následuje průběh pro severovýchod, kde by měly mít obě osy stejnou úroveň i stejnou fázi.
Následuje průběh pro severovýchod, kde by měly mít obě osy stejnou úroveň i stejnou fázi.
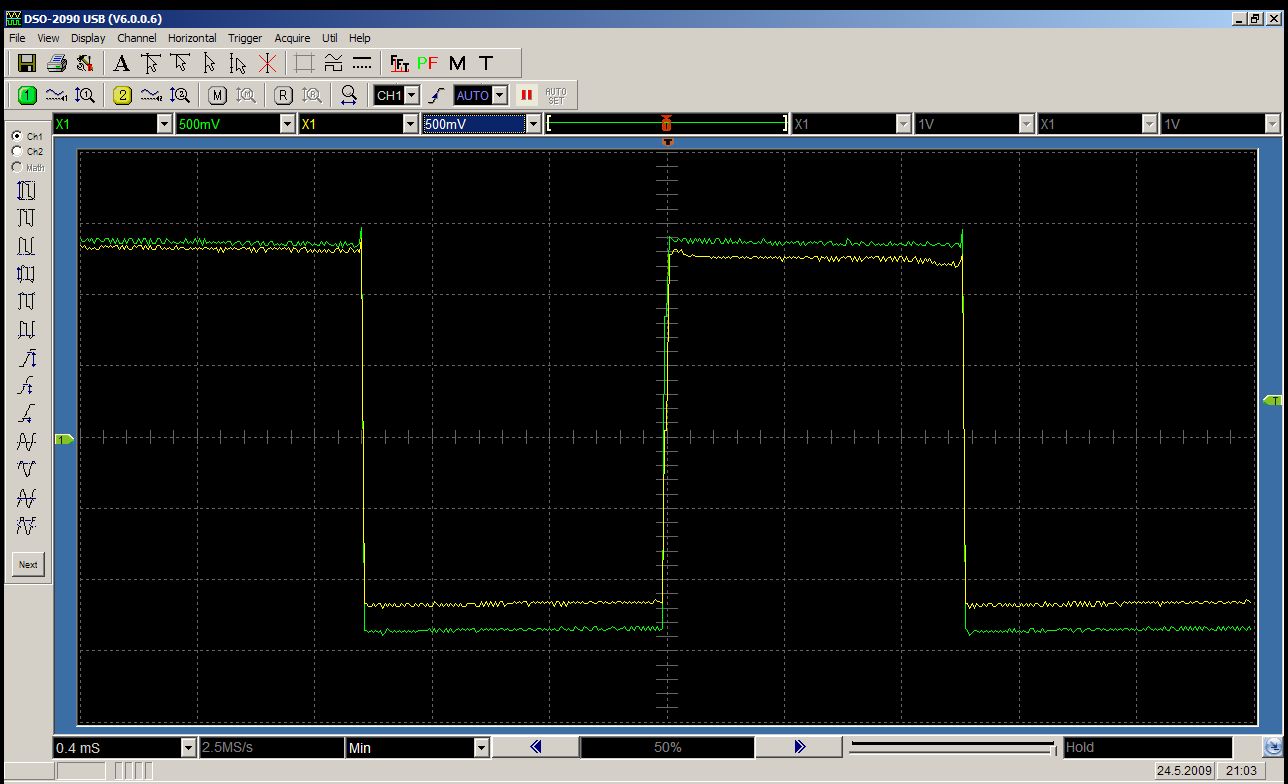 Pro severozápad musí také platit, že úrovně v obou osách jsou stejné, ovšem oproti severovýchodu jsou mezi sebou fázově posunuté.
Pro severozápad musí také platit, že úrovně v obou osách jsou stejné, ovšem oproti severovýchodu jsou mezi sebou fázově posunuté.
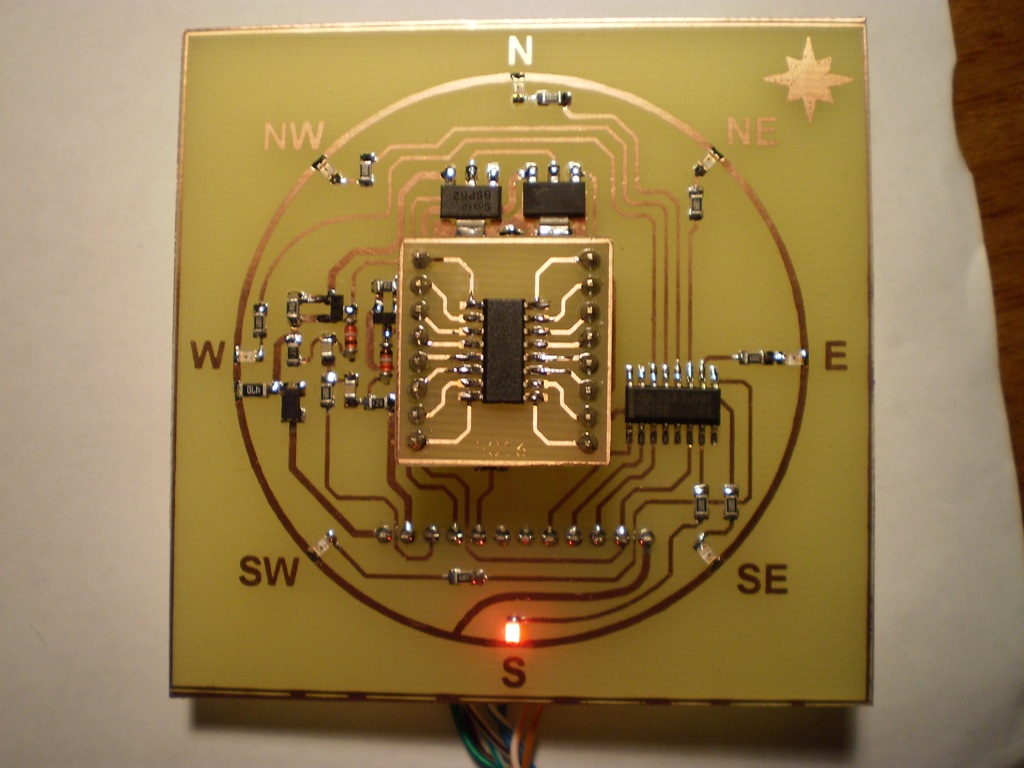
 Pokud bychom dále točili kompasem směrem na západ, postupně by klesala osa x (zelená) na minimum. Na následujícím obrázku je hotový prototyp elektronického kompasu:
Pokud bychom dále točili kompasem směrem na západ, postupně by klesala osa x (zelená) na minimum. Na následujícím obrázku je hotový prototyp elektronického kompasu:
 Veškeré obrázky, podklady pro výrobu DPS atd. lze najít zde.
Veškeré obrázky, podklady pro výrobu DPS atd. lze najít zde.
Cílem tohoto projektu bylo zjistit možnosti senzoru magnetického pole a jeho využití pro měření azimutu. Tímto prototypem lze rozlišit základní směry, pro přesné určení(dá se docílit přesnosti +/- 2 stupně) azimutu by bylo zapotřebí kompenzovat i další nepřesnosti a nedokázali bychom se obejít bez dalšího zdroje s napájecím napětím kolem 10V, neboť s 5V napájením nelze dosáhnout proudu 1A, který je nutný pro kompenzaci offsetu. Co se týká rozlišení pouze základních 8-mi směrů je to velice jednoduché, neboť je potřeba pouze zjišťovat přítomnost signálu a porovnat je mezi sebou. Tuto jednoduchou funkci lze vytvořit pouze s několika logickými členy a použití mikroprocesoru je v takovém případě zbytečné.
[1] STRONK T. Electronic compass design using KMZ51 and KMZ52. Philips semiconductors, Germany, 2000.