Snímání dotyku pomocí LED
Jan Daněk, UREL, FEEC, VUT Brno
xdanek00 stud.feec.vutbr.cz
stud.feec.vutbr.cz
Marek Müller, UREL, FEEC, VUT Brno
xmulle02stud.feec.vutbr.cz
Obsah:
- Úvod
- Teorie
- Praktické pokusy
- Závěr
- Literatura
LED diody jsou nejčastěji používány k indikaci stavů zařízení či k jiným grafickým efektům. Ve
většině případů se jedná o výstupní zařízení. Cílem tohoto projektu je prozkoumat možnosti zapojení LED diod jako zařízení
vstupních. Pak je možné používat LED diodu pro signalizaci stavů i pro snímání okolí. Velmi lákavé je snímání dotyku a
následná odezva pomocí svitu LED diod.
Snímání dotyku je založeno na měření napětí na LED diodě v závěrném směru. Toto napětí vzniká
generací elektronů pomocí dopadajícího světla. Napětí na LED diodě je závislé na intenzitě okolního světla.
Napětí vybuzené na LED diodě je velmi malé. Při měření voltmetrem se vstupním odporem
10 Mohm a běžné denní intenzitě světla je velikost napětí asi 20 až 40 mV. Toto napětí lze zesílit operačním zesilovačem či
přímo změřit pomocí AD převodníku. Tato řešení však vyžadují další hardware a postrádají eleganci.
Dalším způsobem je využití kapacity PN přechodu diody. Tato kapacita je nabita (napětí v
závěrném smyslu diody) a vybíjena nábojem generovaným dopadajícím světlem. Čím větší je světelná intenzita okolí, tím
pomaleji se kapacita diody vybíjí až k nulové hodnotě napětí. Princip této metody je zobrazen na obr. 1 [2]. Stav Step 1 je
určen k signalizaci, dioda je zapojena běžným způsobem. Stav Step 2 je určen k nabití vnitřní kapacity LED diody. Stav Step 3
měří (zjišťuje) velikost tohoto napětí na katodě LED diody.
Velice výhodný a elengantní je způsob vyhodnocení doby poklesu napětí diody na určitou
úroveň (z log. 1 do log.0). Tento čas je měřen pomocí časovače, hodnota registru časovače odpovídá intenzitě okolního světla.
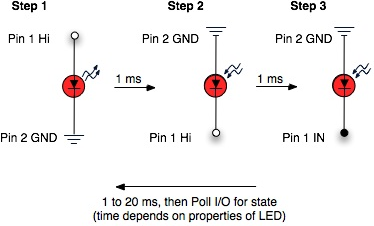
Obr. 1: Fáze čtení a svícení LED diody [2]
Napětí generované dopadajícím světlem je závislé na typu pouzdra diody a vyzařované vlnové
délce. Vhodné jsou diody s velkými vyzařovacími úhly. Dopadající světlo je pak směrováno z většího okolního prostoru. Vlnová
délka záření diody (barva pouzdra) podle zdroje [1] příliš nerozhoduje. Nejsou zde ovšem uvedeny infračervené diody, které
podle diskuzí generují vyšší napětí.
Zajímavé je využití matice LED diod jako dotykový senzor. Na obr. 2 převzatém z [5] je
uvedeno grafické vyjádření postupu pro využití matice 8x8 LED diod jako senzorového pole. První krok (Step 1) zahrnuje
vybrání příslušné osvětlovací LED diody, která bude poskytovat světlo pro sousední (blízké) senzory k snímání. Druhým krokem
(Step 2) je obrácení předpětí blízkých LED diod, čímž jsou připraveny se stát senzory. Dioda v sousedním řádku a sloupci musí
být vybrána k zabránění elektrickému rušení z osvětlovače. V třetím kroku (Step 3) dojde k přečtení napětí na katodě diody,
které tak udává světelnou úroveň detekovanou senzorem. Nakonec ve čtvrtém kroku (Step 4) pak řadič může vybrat další sousední
diodu, aby ji použil jako senzor nebo se přesunout k dalšímu bodu v poli opakováním celého postupu. Pro realizaci je vhodný
maticově uspořádaný LED zobrazovač se společnou anodou. V zapojení se společnou anodou a jednotlivých katodách lze odebírat proud
pouze z katody jedné diody (čtení). Ostatní fáze jsou méně kritické. Svícení lze provést připojením log.1 (5V) na společnou anodu,
hodnotou katody log. 0 (0V) řídit svícení jednotlivých LED. Obdobně (s obrázecenou polaritou a a K) se provede nabíjení LED diody.
Všechny tyto kroky je nutné časově multiplexovat, obdobně jako při práci s obyčejným maticovým zobrazovačem LED.
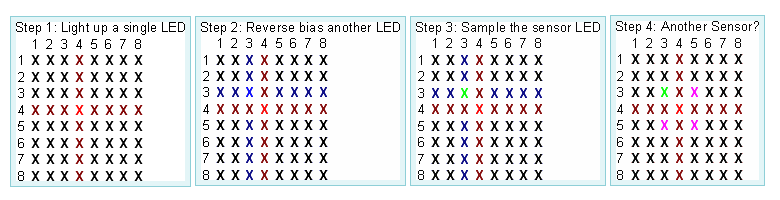
Obr. 2: Jednotlivé fáze činnosti matice 8x8 LED, kdy 1 LED dioda osvětluje sousední snímací LED diody [5]
Použitý přípravek je nachystán na připojení k vývojové desce s procesorem ATmega16. Schéma
zapojení a deska plošných spojů jsou vytvořeny v programu Eagle na obr. 3. Přípravek je nachystán k obousměrnému připojení
LED diod s ochranným odporem 330 Ohm. Anoda LED diody je připojena na port A, katoda na port B mikroprocesoru. Toto zapojení
umožnuje vyzkoušet možnosti měření pomocí AD převodníku i poklesem do log.0. Při využití AD převodníku ke čtení velikosti
napětí, jsou diody zapojeny katodou na port A. Anoda je uzemněna portem B. Při čtení velikosti napětí vnitřním hradlem jsou
porty A a B zapojeny jako digitální vstupy/výstupy.
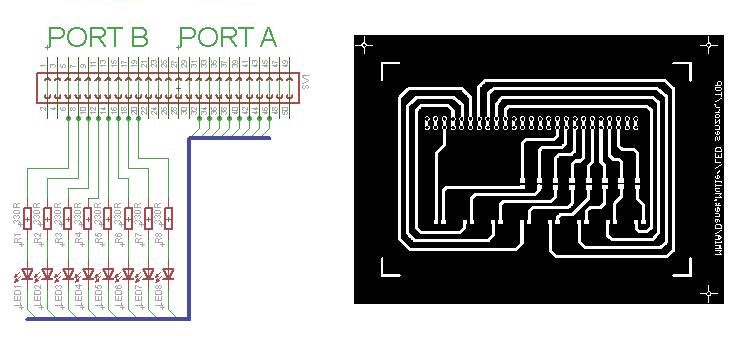
Obr. 3: Schéma zapojení LED diod a zrcadlový obraz desky plošných spojů
Prvním zkoušeným přístupem bylo měření hodnoty pomocí AD převodníku. V hlavní smyčce je
inicializace LCD displeje a AD převodníku. Poté program cyklicky čte hodnotu AD převodníku a porovnává ji s vypočtenou
hranicí pro vyhodnocení stisku. Hranice je vypočtena ,,na světle", tzn. bez stisku. Toto provedení má rozdíl mezi stisknutím
a uvolněním asi 20-40 mV. To není příliš pro spolehlivé vyhodnocení. Tento problém se dá částečně obejít přídáním hystereze
a vhodného průměrování. Stisk je signalizován rozsvícením signalizačních LED diod připojených na portu D. Poté je na LCD
displej vypsána hodnota změřená AD převodníkem.
#include <avr\io.h>
#include <stdlib.h>
#include <avr\iom16.h>
#include <avr\interrupt.h>
#include "lcd_c.c"
#define F_OSC 16000000
char LED_touch;
unsigned long avg=190;int main(void)
{ lcd_init(); ADMUX|=(1<<REFS0)|(1<<REFS1); ADCSRA|=(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0); ADCSRA|=(1<<ADEN); while(1){ DDRB|=(1<<0);
PORTB&=~(1<<0); DDRA&=~(1<<0); ADCSRA|=(1<<ADSC); while((ADCSRA&(1<<ADSC)));
if (ADC>avg+5){ DDRD=0xf0; PORTD=0x00;
} else { DDRD=0xf0; PORTD=0xf0;
avg=(9*avg+ADC)/10;
}
zobraz(avg);
}
Lepším přístupem je vyhodnocování poklesu napětí na LED diodě do log.0. U tohoto přístupu
není potřeba AD převodník, pro jednu LED diodu stačí jen dva piny procesoru. V hlavní smyčce main je funkce LED_read(), která
slouží ke změření dopadajícího světla (stisku) a dále funkce _delay_ms(), která vymezuje čas pro signalizaci LED diodami.
Funkce LED_read() pracuje s porty A a B, na kterých jsou připojeny LED diody (A na PORTB a
K na PORTA). U čteného portu musí být vypnuty odpory pull-up!!! Tyto odpory totiž spotřebují náboj, který se pracně získal
přepólováním LED diod. Funkce využívá časovač 1 pro měření doby poklesu. Délka měření jedné LED diody je dána hlavně dobou
poklesu napětí na úroveň log.0. Celková doba měření je asi 3 ms. Jestliže je toto měření vloženo do stálého svitu LED diody,
je tato doba už patrná lidským okem jako blikání.
Na začátku funkce jsou uloženy hodnoty portů A a B, které se budou pro potřeby měření dále
měnit. Tyto hodnoty jsou na konci funkce zase obnoveny. V další části funkce se na LED přivede opačné napětí (na A 0V a na K
+5V), LED je tak v závěrném režimu a dochází k nabití vnitřní kapacity. Proces nabíjení je ihned hotov, není třeba čekat
delší dobu. Po nabití se spustí časovač 1 a opakovaně se čte katoda diody (PORT A). Opakované čtení je nutné, protože toto
neustálé čtení vytváří odběr z katody a úroveň napětí poklesne relativně rychle. Při pokusu o přečtení po určité době byla
úroveň napětí mnohem větší. Čtení je prováděno, dokud úroveň na katodě nedosáhne úrovně napětí log.0 a v tu chvíli se zastaví
čítač. Hodnota čítacího registru TCNT1 udává čas, za který poklesla úroveň napětí k nule. Tento čas je ovlivněn dopadajícím
světlem. Čím větší je intenzita dopadajícího světla, tím více je čas poklesu delší. Při zatemněné diodě je hodnota čítacího
registru TCNT1 = 0 až 15 000, při denním osvětlení je hodnota čítacího registru TCNT1 = 50 000. Tyto hodnoty jsou pouze
orientační a dochází k jejím postupným změnám v závislosti na okolním osvětlení. Další část funkce vyhodnocuje stisk tlačítka
v závislosti na hodnotě registu TCNT1. Stisk tlačítka je signalizován 4 LED diodami na portu D. Hraniční hodnota 20 000 byla
zvolena experimentálně a pro univerzálnost by bylo nejvhodnější ji vypočítat z prvního měření. Hodnota čítacího registru je
poté vynulována. Pro účely testování je zakomentována část kódu [3] využívající LCD displej k zobrazení aktuální hodnoty
čítacího registru.
#include <avr\io.h>
#include <stdlib.h>
#include <avr\iom16.h>
#include <avr\interrupt.h>
#include "lcd_c.c"
#define F_OSC 16000000
char LED_touch=0;
unsigned long avg;int main(void)
{
SFIOR|=(1<<PUD); DDRB=0xff;
PORTB=0xff; DDRA=0xff; PORTA=0x00;
while(1){
LED_read(); _delay_ms(250);
}
return 0;
}
void LED_read(){
unsigned char outputB,outputA;
unsigned char bit_num=0; outputB=PORTB;
outputA=PORTA; DDRB|=(1<<bit_num);
PORTB&=(1<<bit_num); DDRA|=(1<<bit_num);
PORTA|=(1<<bit_num); DDRB|=(1<<bit_num);
PORTB&=~(1<<bit_num); DDRA&=~(1<<bit_num);
TCCR1B|=(1<<CS01); while(PINA&(1<<bit_num));
TCCR1B&=~(1<<CS01);
if (TCNT1/100>200){ DDRD=0xf0; PORTD=0xf0;
LED_touch=0x00;
} else { DDRD=0xf0; PORTD=0x00;
LED_touch=0xff;
}
TCNT1=0; DDRA=0xff;
DDRB=0xff;
PORTB=outputB;
PORTA=outputA;
}
void zobraz(unsigned long co)
{
unsigned int pom;
char dig1,dig2,dig3,dig4,dig5;
char text[] = " \n";
dig1=co/10000;
pom=co-10000*(unsigned int)dig1;
dig2=pom/1000;
pom=pom-1000*(unsigned int)dig2;
dig3=pom/100;
pom=pom-100*(unsigned int)dig3;
dig4=pom/10;
pom=pom-10*(unsigned int)dig4;
dig5=pom;
text[0]=48+dig1; text[1]=48+dig2;
text[2]=48+dig3;
text[3]=48+dig4;
text[4]=48+dig5;
lcd_clrscr();
lcd_puts(text);
}
Výše uvedený přípravek a kód byl vyzkoušen na mikroprocesoru ATmega16 s využitím školní
vývojové desky BUT FEEC UREL 2006. Byly použity SMD LED diody těchto parametrů: SMD žlutá, pouzdro B0805, vlnová délka
595 nm, svítivost Iv = 50 mcd při proudu v propustném směru If = 20 mA, vyzařovací úhel 120°, napětí Uf = 2,1 V a odpory SMD
o hodnotě 330 ohmů.
První metoda měření bez ,,přepólování" vykazovala malou citlivost na intenzitu okolního
světla. Odpojením odporu pull-up a ,,přepólováním" diody došlo ke zvýšení citlivosti avšak za cenu nestabilních výsledků. Při
zastínění diody nevodivým předmětem se zařízení chová uspokojivě a signalizuje stisk, ale při přiblížení vodivé plochy
(lidské ruky) dochází také k signalizaci stisku, ale přerušovanému. Velikost měřeného náboje je příliš malá a je ovlivňována
přeslechy a rušením ve vývojové desce a také v samotném přípravku, který není dostatečně odstíněn.
Byly představeny dvě hlavní metody použití standardních LED diod k měření
intenzity dopadajícího světla. Uspokojivé výsledky přinesla metoda s ,,přepólováním". Uvedený kód je pouze konceptem, který
vykazuje určité výsledky, ale nepříliš stabilní. Velkým problémem je okolní rušení. Toto rušení by mohlo jít částečně
kompenzovat pomocí průměrování a lepším návrhem desky plošných spojů s důkladným stíněním. Z časových důvodů nebylo provedeno
bližší zkoumání. Zajímavou možností je využití okolní LED diody, která není právě měřena, ke svícení. Tím by se zvýšila
intenzita světla dopadajícího na měřenou LED diodu. Došlo by tak ke zvýšení citlivosti na dotyk. Tento způsob se jeví jako
nejvhodnější. Využití matice 8x8 LED diod bylo pouze teoreticky naznačeno [5], praktické
provedení už z časových důvodů provedeno nebylo. Další informace jsou uvedeny zejména v [4].
Celý projekt je možné stáhnout zde.
RAR obsahuje soubory programu Eagle, zdrojové soubory AVR Studia i html dokumentaci.
[1] ZACHOVALOVÁ, V., Fotovoltaický jev u diod, 2010 [Online] Dostupné
z WWW: < http://hw.cz/Teorie-a-praxe/Dokumentace/ART1031-Fotovoltaicky-jev-u-diod-LED.html >.
[2] LED Touch Sensor, 2010 [Online] Dostupné
z WWW: < http://forums.parallax.com/forums/default.aspx?f=21&m=128674 >.
[3] Počítačová cvičení MMIA, 2010.
[4] Forum LEDs As Sensors, 2010 [Online] Dostupné z WWW: < http://projects.dimension-x.net/technology-and-projects/ledsensors >.
[5] Matrices as Sensors, 2010 [Online] Dostupné z WWW: < http://projects.dimension-x.net/archives/63 >.