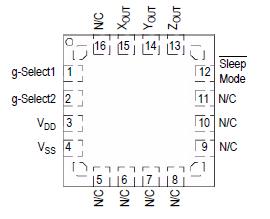
Obr. 1: Rozmístìní vývodù obvodu MMA7260QT na pouzdru QFN.
Netáhlo Tomáš, xnetah00@stud.feec.vutbr.cz
Dvoøák Martin, xdvora64@stud.feec.vutbr.cz
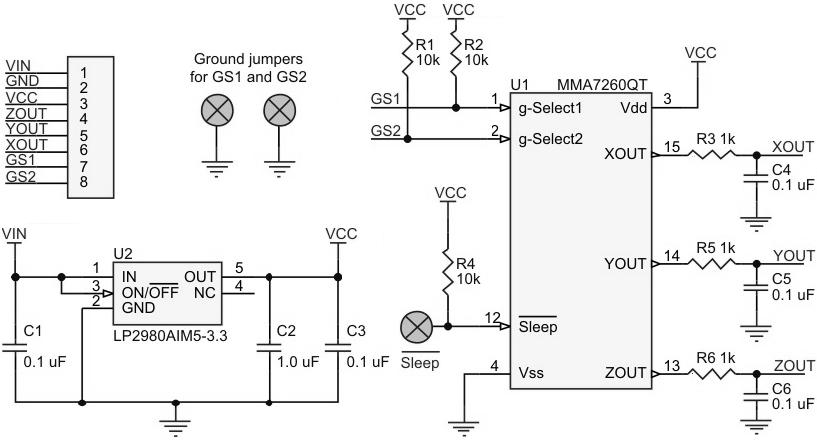
Jelikož se akcelerometr vyrábí v miniaturním QFN pouzdøe u kterého by byl problém s pájením obvodu, byl použit modul od firmy Pololu Robotics & Electronics. Modul obsahuje již zmínìný akcelerometr a další doplòující obvody. Celý modul lze napájet napìtím od 3,6 V do 15 V, protože obsahuje stabilizátor napìtí LP2980AIM5-3.3. Na výstupech všech tøí os X, Y i Z jsou zapojeny RC filtry, jak je doporuèeno v datasheetu akcelerometru. Celkové schéma zapojení modulu udává obr. 2.
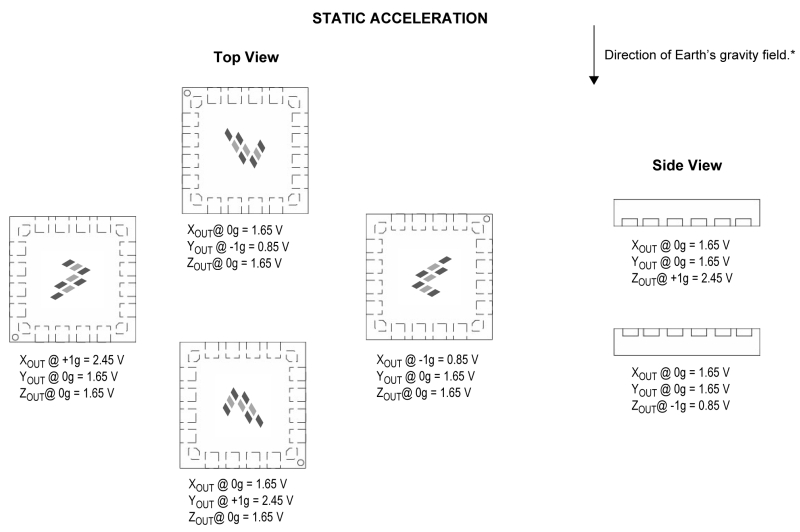
Výstupy akcelerometru jsou analogové. Pro pøevod napìtí ze všech tøí os akcelerometru se používá A/D pøevodník mikrokontroléru ATmega8. Velikost napìtí na výstupu všech tøí os pøi mìøení statického zrychlení na rozsahu 1,5 g udává tabulka è. 1, viz obr. 3. Hodnota 0 g odpovídá vodorovné ose, neboli náklonu 0°. Hodnoty 1 g a -1 g odpovídají poloze osy kolmé k zemskému povrchu, neboli náklonu 90° a - 90°.
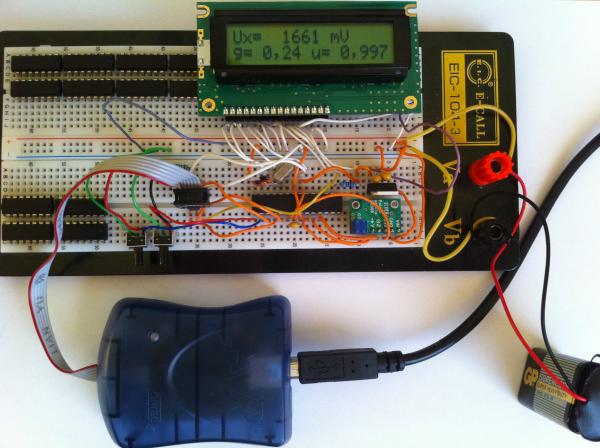
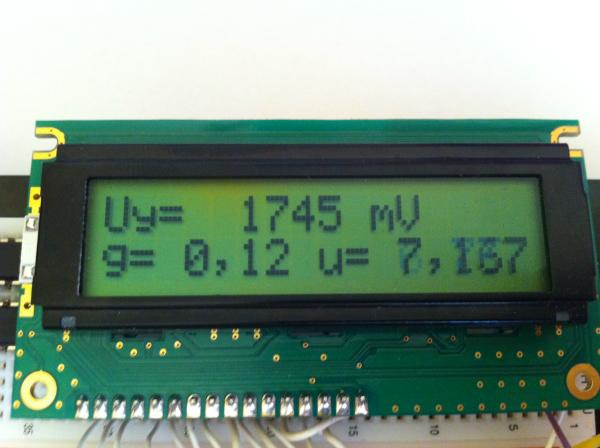
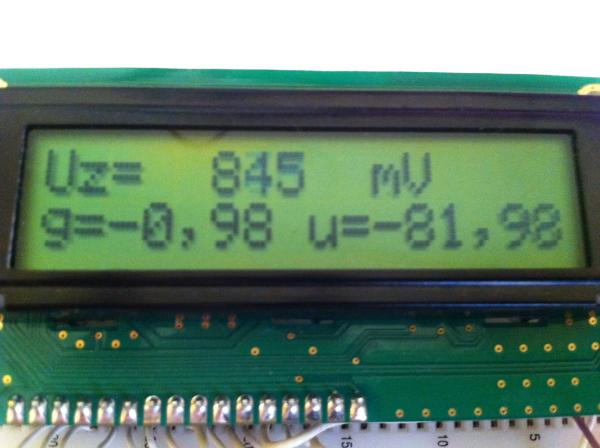
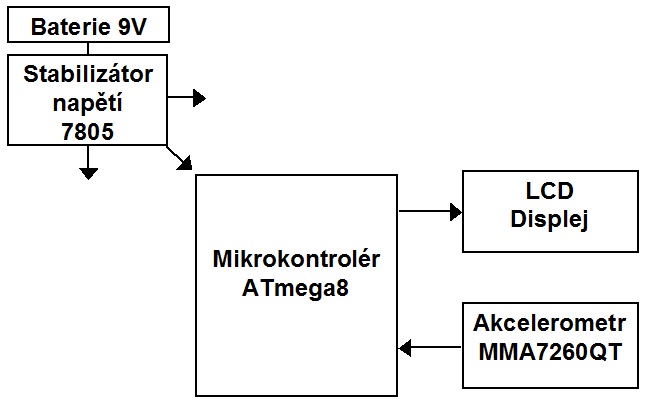
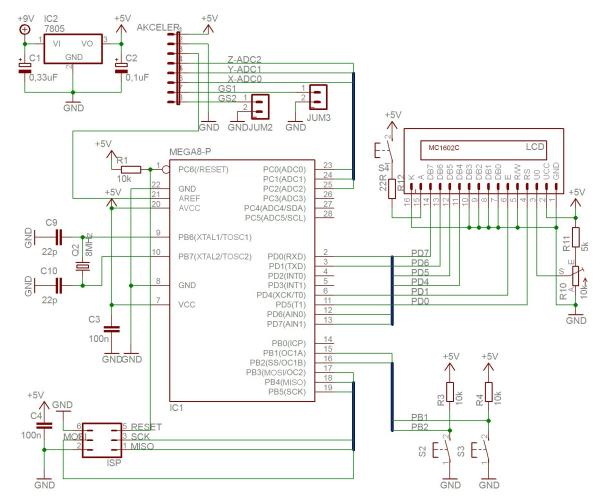
Na obr. 4 je uvedeno blokové schéma akcelerometru. Výstupy X, Y, Z akcelerometru jsou pøipojeny na A/D pøevodník mikrokontroléru ATmega8. Jako referenèní napìtí pro A/D pøevodník je použito napìtí 3,3 V z vývodu VDD, které je pøipojeno na pin AREF mikrokontroléru. Protože A/D pøevodník mikrokontroléru je 10-bitový, mohou data nabývat hodnot 0-1023 (v rozsahu napìtí 0-3,3 V) U akcelerometru byla nastavena citlivost 1,5 g (pomocí propojek na SG1 a SG2). Zmìøené a vypoètené hodnoty napìtí, tíhového zrychlení a úhlu natoèení se zobrazují na LCD displeji 16x2. Celý obvod je napájen pomocí 9 V baterie a potøebná zmìna napìtí na hodnotu 5 V se provádí regulátorem napìtí.
Výpoèet napìtí se provádí podle následujícího vzorce:
x = ((napeti)*(3.3/1023)*1000);
kde promìnná napìtí odpovídá hodnotì uložené v registru ADCW, tato hodnota je vynásobena podílem referenèního napìtí 3,3 V a rozsahem A/D pøevodníku. Výsledná hodnota napìtí je poté zobrazována v mV.
Poté se vypoèítá hodnota tíhového zrychlení:
gx=((x-1650)/8.1);
kde od zmìøené hodnoty napìtí x, odeèteme hodnotu 1650 mV, která odpovídá nulovému tíhovému zrychlení a tyto hodnoty vydìlíme poètem dílkù mezi 0 g a 1 g. Pozn. poèet dílkù je vydìlen 100, kvùli zobrazení na LCD.
Z hodnoty tíhového zrychlení lze poté vypoèítat úhel náklonu, protože hodnota 0 g odpovídá vodorovné ose a hodnota 1 g odpovídá úhlu 90°.
uhelx=(asin(gx/100))/3.14*18000;
Ukázka zdrojového kódu, kompletní zdrojový kód je ke stažení: zdrojový kód.
ADMUX = 0b00000000; // kanál nula AD pøevodníku ADCSRA = (1<<ADEN)|(1<<ADSC)|(1<<ADIF)|(1<<ADIE)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0); // povolení AD pøevodu, pøerušení po dokonèení pøevodu, pøeddìlièka 128 /****************************************************************** zobrazení na LCD *******************************************************************/ lcd_gotoxy(0,0); sprintf(buffer,"Ux= %d mV",ux); // napìtí na ose x lcd_puts(buffer); lcd_gotoxy(0,1); if (gx1>=0) // tíhové zrychleni g osa x { sprintf(buffer,"g= %d,%d", gx1/100, gx1%100); lcd_puts(buffer); } else { gx1=(-1)*gx1; // tíhové zrychleni g záporné osa x sprintf(buffer,"g=-%d,%d", gx1/100, gx1%100); lcd_puts(buffer); } lcd_gotoxy(8,1); if (uhelx1>=0) // úhel náklonu osa x { sprintf(buffer,"u= %d,%d", uhelx1/100, uhelx1%100); lcd_puts(buffer); } else { uhelx1=(-1)*uhelx1; // úhel náklonu záporný osa x sprintf(buffer,"u=-%d,%d", uhelx1/100, uhelx1%100); lcd_puts(buffer); } /**************************************************************** obsluha AD pøevodníku *******************************************************************/ ISR(ADC_vect) { int napeti,x,y,z; double uhelx, uhely, uhelz; double gx, gy, gz; napeti = (ADCW); x = ((napeti)*(3.3/1023)*1000); // vypoèet napìtí osa x ux=x; gx=((x-1650)/8.1); // výpoèet tíhového zrychlení osa x, stokrát vìtší gx1=gx; uhelx=(asin(gx/100))/3.14*18000; // výpoèet úhlu náklonu osa x, stokrát vìtší uhelx1=uhelx; break; ADMUX++; // posun na další kanál AD pøevodníku if (ADMUX>2) { ADMUX=0; } ADCSRA = (1<<ADEN)|(1<<ADSC)|(1<<ADIF)|(1<<ADIE)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0); // opìtovné spuštìní AD pøevodu }