REGULÁTOR LED OSVĚTLENÍ SCHODIŠTĚ
Ondřej Spielmann, UREL, VUT Brno 2013
xspiel00 stud.feec.vutbr.cz
stud.feec.vutbr.cz
Obsah:
- Úvod
- Realizace HW
- Realizace SW
- Závěr
- Literatura
Cílem projektu je vytvoření ovládací jednotky, regulátoru, pro účely osvětlení schodiště.
Schodiště, resp. jeho každý schod je osvětlen LED páskem. Osvětlení reaguje na průchozí
osoby a adekvátně i vyhodnocuje úroveň okolního osvětlení. Nastavitelné jsou parametry jako
doba svitu, rychlost rozsvěcování, délka doběhu svitu, atp.
Regulátor je realizován na dvoustranné desce plošných spojů. Jádrem regulátoru je 8bit.
mikrokontrolér ATmega16, který se programuje přes rozhraní ISP (použit programátor AVR Dragon).
K MCU je připojeno 5 trimrů pro nastavení následujících parametrů:
- TR1 - Nastavení intenzity aktivace sepnutí osvětlení (souvisí s úrovní okolního osvětlení)
- TR2 - Manuální nastavení jasu osvětlení
- TR3 - Rychlost postupného rozsvěcování
- TR4 - Doba svitu po rozsvěcení celého schodiště
- TR5 - Nastavení jasu při postupném rozsvěcování
Dále je k MCU připojen fotorezistor, který snímá hodnotu okolního rozsvěcení. Díky tomu se osvětlení
neaktivuje při hodnotě menší, než jaká se nastaví trimrem TR1. Samotné sepnutí a zahájení osvětlovacího
cyklu je zahájeno dvěma možnými způsoby. První pomocí manuálního aktivačního vstupu AKT (spíná proti
GND). Druhá možnost sepnutí je pomocí ultrazvukových čidel. Ta jsou umístěna na obou koncích schodiště
a při detekci pohybu na začátku schodiště generují aktivační signál pro zahájení cyklu rozsvěcení.
Schodiště má 13 schodů a každý je podsvětlen LED páskem (napájecí napětí pásku je 12V). Napájení pásků
je zajištěno přes spínaní unipolárních tranzistorů IRLML0030. Všechny pásky jsou spojeny jejich kladnými
napájecími vodiči (spínají se proti GND). Napájení MCU je realizováno přes 5V stabilizátor.
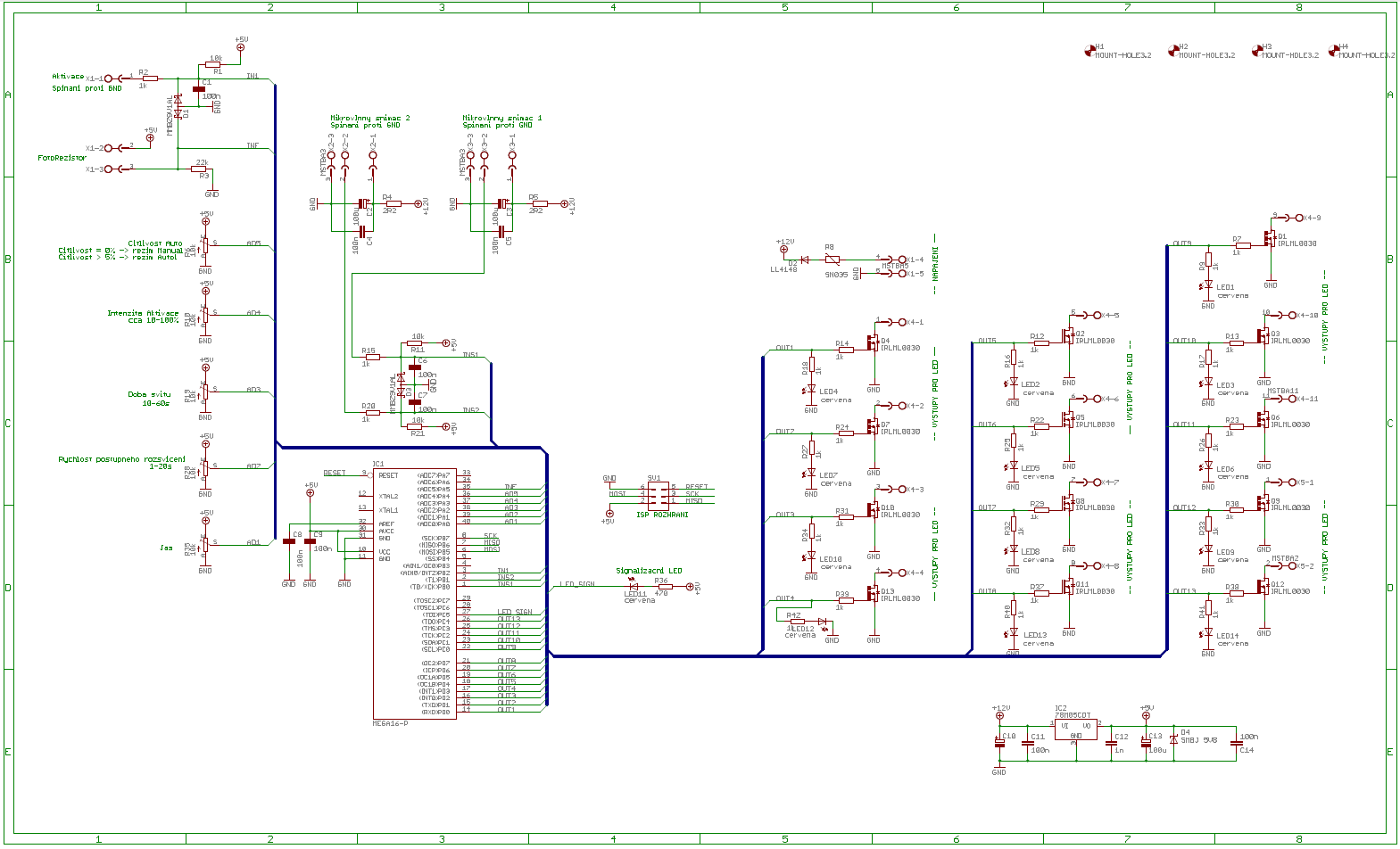
Obr.1: Schéma zapojení regulátoru
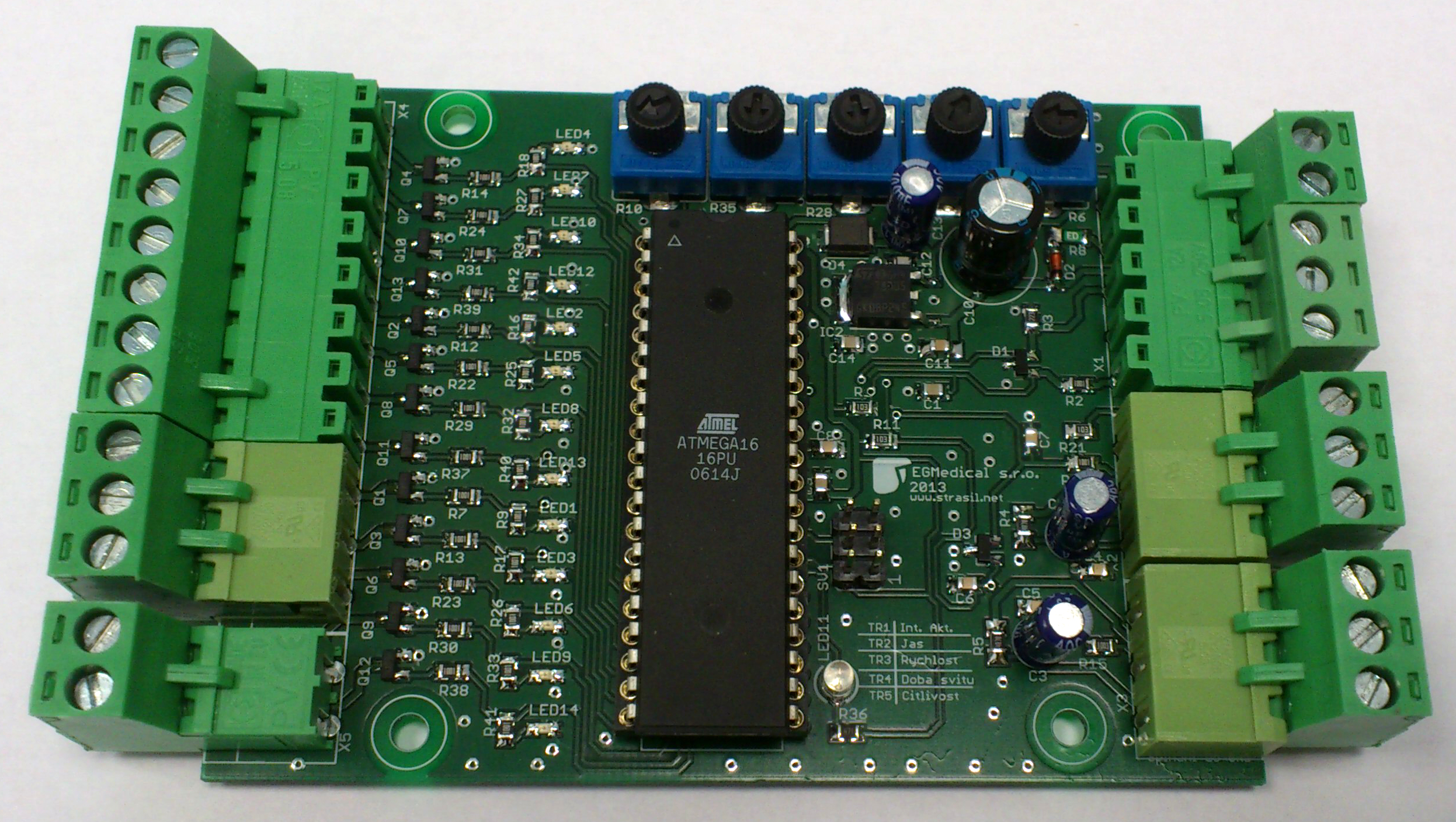
Obr.2: Foto osazené DPS regulátoru
Software byl napsán v prostředí AVR Studio v4.18 v jazyce C. Výsledný nahrávaný *.hex soubor má velikost cca 12kB.
Běhu programu v MCU je zřetelný z vývojového diagramu na Obr.3. Po připojení napájecího napětí se provede inicializace jednotlivých portů,
nastaví se masky přerušení a zavedou se potřebné proměnné. Odstartuje se také časovač, který generuje řídící signál pro tvorbu softwarového
PWM signálu pro požadovaných 13 kanálů - inkrementace je prováděna v přerušení. Nastavená opakovací frekvence generování PWM signálu je 250Hz, avšak při vytíženosti přerušením
ALU bylo dosaženo maximální frekvence cca poloviční. To bylo možné jen při zapnutých optimalizacích "na rychlost" při překladu programu.
Při jiných optimalizacích byl generovaný PWM signál ještě mnohem pomalejší. Celé je to způsobeno velkých počtem PWM kanálů
(pole o rozměru 13). Experimentálně bylo ověřena závislost počtu PWM kanálů na reálné generované rychlosti PWM signálu. Program dále pokračuje
na větvící podmínku, kde při NEaktivaci od MW senzorů (a i vstupu AKT) proběhne vyčtení jednotlivých A/D převodníků, které čtou hodnoty
nastavené pomocí trimrů TR1 až TR5 a fotorezistoru. V případě, že je aktivován jeden ze senzorů, proběhne zpracování hodnot z A/D převodníků
a dle zvoleného směru a režimu odstartuje cyklus rozsvěcování jednotlivých pásků. Po skončení této úlohy program opět skáče na větvící podmínku.
Z uživatelského hlediska má pak běh programu následující charakter: Pokud je aktivován vstup AKT (například připojený spínač) dojde k rozsvícení
všech LED pásků postupným přidáváním jasu. Jakmile jsou LED pásky v nastavené úrovni osvětlení (trimr TR2) jsou v tomto stavu po nastavenou dobu (trimr TR4).
Po uplynutí této doby opět všechny postupně naráz zhasnou. Při aktivaci od mikrovlnného senzoru se nejdříve srovná hodnota okolního osvětlení
s hodnotou nastavenou trimrem TR1. V případě, že je okolní úroveň osvětlení menší než nastavenný limit, dojde k postupně k měkkému rozsvěcování jednotlivých
pásků postupně za sebou. Směr rozsvěcování je dán mikrovlnným senzorem. Rychlost rozsvěcování se ovlivňuje trimrem TR3 a intenzita maximálního svitu je ovlivněna trimrem TR5. Pásky pak opět svítí po
dobu nastavenou TR4 a po jejím uplynutí se všechny naráz stmívají až úplně zhasnou.
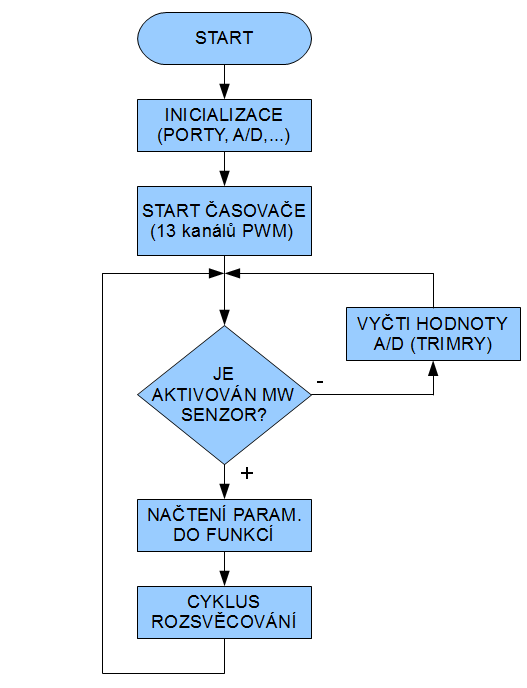
Obr.3: Vývojový diagram běhu programu MCU
Balíček zdrojových dat je možné stáhnout ZDE
Schéma a návrh DPS ZDE
Předvedený prototyp je plně funkční a je již úspěšně instalován. Ovládácí program mikrokontroléru by mohl být ještě dále optimalizován,
aby se dosáhlo lepších výsledků hodnot opakovací frekvence PWM signálu. Pro větší počet LED pásků by pak bylo vhodné použít MCU
s výkonějším jádrem. Změna počtu LED pásků by se pak provedlo pouhou změnou jedné hodnoty v úvodu programu, kde je nadefinována.
Spínácí tranzistory mají ještě dostatečnou výkonovou rezervu - mohou být užity pro napětí až 30V a proud 5,3A. Předloženým zařízením
tak není nutné ovládat pouze LED pásky, ale i jiná pulzně modulovaná výkonová zařízení.
[1] Friedl, M. Vývojový kit s ATmega16. Praktická elektronika a radio, 2010, roč.XV/2010,č.3, s 19-20. ISSN:1211-328X.
[2] Atmel Corporation. ATmega16 datasheet [on-line]. Vydáno 20.7.2009, [citováno 2012-04-25]. Dostupné z: http://www.atmel.com/dyn/resources/prod_documents/doc8154.pdf
[3] International Rectifier. Power MOSFET IRLML0030 datasheet [on-line]. [citováno 2013-04-25]. Dostupné z: http://www.irf.com/product-info/datasheets/data/irlml0030pbf.pdf