5.1 Modelování drátových antén v časové oblasti metodou momentůPodrobnější popisV této vrstvě bude odvozen implicitní algoritmus řešením soustavy rovnic (5.1A.1) až (5.1A.6) pro drátový dipól, který je umístěn podél osy z. Vzhledem k tomu, že v této soustavě rovnic vystupují pouze z-ové složky vektorového potenciálu a intenzity elektrického pole, nemá smysl složky vektorů do souřadných směrů rozlišovat; v dalším textu můžeme dolní index z vynechat. Při odvození výchozího vztahu pro implicitní algoritmus vyjděme
z rovnice (5.1A.5), kterou je možné po zahrnutí okrajové podmínky (5.1A.6)
přepsat do následující podoby |
.
|
( 5.1B.1 )
|
Nyní přistupme
k prvnímu kroku řešení, tj. k aplikaci metody momentů na rovnici (5.1B.1).
Rozdělme drátový dipól na N stejných segmentů délky Δz a označme konce segmentů souřadnicemi z0, z1, …, zN+1 (obr. 5.1B.1). Středy segmentů označme z0+, z1+, …, zN+, resp. z1-, z2-, …, zN+1-. Pro expanzi rozložení proudu na drátovém dipólu v prostoru použijeme konstantní bázové funkce: v oblasti proudové buňky (obr. 5.1B.1), která je ohraničena souřadnicemi zn+, zn+1+ resp. zn-1-, zn-, uvažujme konstantní rozložení proudu. Zde je nutné připomenout, že na konci drátu proud
nemá kam téct a je roven nule. V oblasti nábojové buňky ohraničené souřadnicemi
zn, zn+1 uvažujeme konstantní rozložení nábojové hustoty.
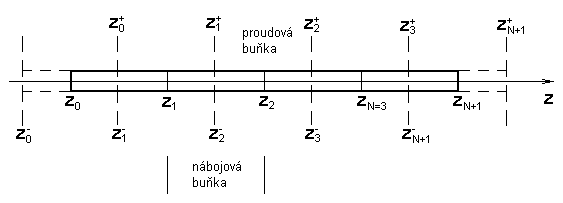 |
| Obr. 5.1B.1 | Diskretizace drátového dipólu. |
|
Konstantní bázové funkce v oblasti proudové buňky definujeme následujícím předpisem:
|
.
|
( 5.1B.2 )
|
Pomocí těchto bázových funkcí a časově závislých neznámých proudových koeficientů In (t) časoprostorové rozložení proudu ve vztahu (5.1A.1) může být rozepsáno
|
.
|
( 5.1B.3 )
|
Nyní
přistoupíme k disretizaci našeho problému v čase (krok 2). Časovou
osu si rozdělíme do časových intervalů délky Δt a jednotlivé body na časové ose označme tk=kΔt pro k = 0, 1, 2, …, ∞. V těchto časových okamžicích budeme vyčíslovat rozložení proudu na drátové anténě.
Dosazením (5.1B.3) do (5.1A.1) může být vektorový potenciál v bodě zm a v čase tk rozepsán v následující formě:
|
,
|
( 5.1B.4 )
|
kde |
,
|
( 5.1B.5 )
|
|
,
|
( 5.1B.6 )
|
|
,
|
( 5.1B.7a )
|
|
.
|
( 5.1B.7b )
|
Pro výpočet vzdálenosti v (5.1B.6) může být použit buď přesný
vztah (5.1B.7a), nebo přibližný (5.1B.7b), který zanedbává poloměr drátu a. Použití přibližného vztahu zvětšuje stabilitu implicitního algoritmu, avšak
přibližný vztah je možné použit jen pokud délka časového kroku násobená
rychlostí světla je mnohem větší než poloměr anténního vodiče, tj. cΔt>>a. Jinak klesá přesnost. Použití přibližného vztahu bylo zavedeno v [37] a v případě splnění
uvedené podmínky je ho dobré používat. Zainteresovaný čtenář si může vyzkoušet
vliv tohoto zanedbání na přesnost a stabilitu algoritmu.
Nyní přistoupíme k diskretizaci skalárního potenciálu (5.1A.2), kde neznámou je časoprostorové rozložení nábojové hustoty. Ta může být vypočtena pomocí rovnice kontinuity (5.1A.4), kterou můžeme přepsat do následující formy
|
.
|
( 5.1B.8 )
|
Dosazením
časoprostorového rozložení proudu (5.1B.3) do (5.1B.8) a náhradou parciální derivace
proudu dle proměnné z středovou diferencí, rovnice kontinuity (5.1B.8) může být po záměně derivace s integrací rozepsána |
.
|
( 5.1B.9 )
|
Vzhledem
k tomu, že používáme konstantní bázové funkce (5.1B.3) pro prostorové rozložení proudu, parciální derivace dle proměnné z v (5.1B.9) nemohla být vypočtena přímo (derivace konstantní funkce je rovna nule),
ale muselo být použito středové diferencování. Aby diferencování bylo
regulérní, byly v (5.1B.9) započítány i integrály proudů dle času na konci
drátového dipólu, které jsou rovny nule. V posledním kroku jsme v (5.1B.9)
zaměnili bázové funkce: z prostorové aproximace proudu pomocí bázových funkcí fn(z) jsme přešli k aproximace nábojové hustoty pomocí bázových funkcí fn+(z). Dosazením rovnice kontinuity (5.1B.9) do rovnice (5.1A.2) můžeme v bodě zm+ a v čase tk vyčíslit skalární potenciál |
,
|
( 5.1B.10 )
|
kde |
,
|
( 5.1B.11 )
|
|
,
|
( 5.1B.12a )
|
|
,
|
( 5.1B.12b )
|
|
.
|
( 5.1B.13 )
|
Zde, podobně jako
v případě výpočtu vektorového potenciálu, je možné použit pro výpočet
vzdálenosti v (5.1B.11) buď
přesný (5.1B.12a), nebo přibližný výpočet (5.1B.12b). Důvody a podmínka jsou zde
stejné jako v případě výpočtu vektorového potenciálu. Obdobně může být
vyjádřen skalární potenciál v bodě zm- a v čase tk |
.
|
( 5.1B.14 )
|
Aby mohly být vyčísleny vztahy (5.1B.10) a (5.1B.14), je nutné
vypočítat integrál proudu dle času. Integrál může být vypočten pomocí různých
numerických integračních pravidel. My zvolíme lichoběžníkovou metodu, protože
je jednoduchá na implementaci a poskytuje uspokojivou přesnost. Numericky je
možné integrál proudu v intervalu 0 až tk, za předpokladu ekvidistantního dělení intervalu vyčíslit jako
|
.
|
( 5.1B.15 )
|
Nyní se vraťme k rovnici (5.1B.1) a diskretizujme ji. První
parciální derivaci vektorové potenciálu dle času aproximujeme středovou
diferencí prvního řádu. Tímto diferencováním je parciální derivace vektorové
potenciálu vyčíslena v bodě zm a v čase tk-1/2. Aby náš výpočet byl dostatečně přesný, musíme v tomto bodě a čase vypočítat
i parciální derivaci skalárního potenciálu dle proměnné z . Toho docílíme opětovným použitím středového diferencování pro skalární potenciál v bodech zm+ a zm- ve dvou časech tk a tk-1. Průměr těchto dvou středových diferencí je vlastně numericky vyčíslená derivace
skalárního potenciálu v bodě zm v čase tk-1/2. Samozřejmě budicí impuls musí být také vyčíslen ve stejném bodě a čase jako vektorový potenciál, tj. v bodě zm a čase tk-1/2. Po těchto krocích můžeme (5.1B.1) přepsat do následujícího tvaru:
|
.
|
( 5.1B.16 )
|
Přepsáním členů v (5.1B.16) dostáváme |
.
|
( 5.1B.17 )
|
Vektorový potenciál na levé straně rovnice (5.1B.17) vypočtený dle (5.1B.4) může být rozepsán jako
|
,
|
( 5.1B.18 )
|
kde |
,
|
( 5.1B.19a )
|
|
.
|
( 5.1B.19b )
|
Pro
vyčíslení A1(zm, tk) jsou uváženy v sumě jen příspěvky proudů ve zpožděném čase tRk(m, n)> tk-1, tedy proudy neznámé. V případě vyčíslení A2(zm, tk) uvažujeme jen příspěvky proudů v čase tRk(m, n)≤ tk-1, tj. proudy známé. Neznámý proud v čase tRk(m, n) v intervalu tk-1 až tk může být vyčíslen jako |
.
|
( 5.1B.20 )
|
Dosazením (5.1B.20) do (5.1B.19a) může být A1(zm, tk) rozepsáno pomocí neznámého a známého proudu v časech tk resp. tk-1 |
,
|
( 5.1B.21 )
|
kde |
,
|
( 5.1B.22a )
|
|
,
|
( 5.1B.22b )
|
Jen člen A11(zm, tk) obsahuje neznámé proudy v čase tk. Nyní
zaměřme pozornost na zbytek levé strany rovnice (5.1B.17), tj. na skalární potenciál (5.1B.10). Ten může být v bodě zm+ vyčíslen jako
|
,
|
( 5.1B.23 )
|
kde členy na pravé straně (5.1B.23) mohou být rozepsány jako vektorový potenciál (5.1B.18). Zaměřme naši pozornost na první člen
|
.
|
( 5.1B.24 )
|
kde |
.
|
( 5.1B.25a )
|
|
.
|
( 5.1B.25b )
|
Situace je analogická jako pro vektorový potenciál, avšak složitější, protože v (5.1B.25) vystupuje integrálu proudu podle času. Vzhledem k tomu, že jen člen φ1(zm++, tk) obsahuje neznámý proud v čase tk, rozepišme integrál proudu přes interval 0 až tRk(m+, n+) v (5.1B.25a) na součet dvou integrálů
|
.
|
( 5.1B.26 )
|
kde |
.
|
( 5.1B.27a )
|
|
.
|
( 5.1B.27b )
|
Člen φ13(zm++, tk) (5.1B.27b) může být jednoduše vyčíslen, protože obsahuje známé hodnoty proudů, avšak člen φ1’(zm++, tk) obsahuje neznámý proud v okamžiku v čase tk. Proto dále rozepišme φ1’(zm++, tk) pomocí lichoběžníkového pravidla pro numerický výpočet integrálu v intervalu tk-1 až tRk(m+, n+) a dále vztahů (5.1B.18) a (5.1B.20) |
,
|
( 5.1B.28 )
|
kde |
,
|
( 5.1B.29a )
|
|
.
|
( 5.1B.29b )
|
Nyní už jen člen φ11(zm++, tk) obsahuje neznámý proud v čase tk. Tento člen může být jednoduše vyjádřen dle (5.1B.29a). Vztah (5.1B.24) může být s uvážením
(5.1B.25) až (5.1B.29) vyjádřen následovně:
|
.
|
( 5.1B.30 )
|
Analogicky můžeme postupovat
v případě vyčíslení φ (zm+-, tk) |
,
|
( 5.1B.31 )
|
resp. skalárního potenciálu φ(zm-, tk). |
,
|
( 5.1B.14 )
|
kde |
,
|
( 5.1B.32a )
|
|
.
|
( 5.1B.32b )
|
Členy na pravých stranách rovnic (5.1B.31) a (5.1B.32) mohou být
obdobně jako členy na pravé straně pomocí rovnic (5.1B.24) až (5.1B.29) vytvořeny pouhou
záměnou odpovídajících si indexů + a -, nebo obráceně. Dosazením (5.1B.10), (5.1B.14), (5.1B.18) až (5.1B.21), (5.1B.24) až (5.1B.32)
do levé strany rovnice (5.1B.17) a po přerovnání členů této rovnice dostáváme |
,
|
( 5.1B.33 )
|
kde |
,
|
( 5.1B.34a )
|
|
,
|
( 5.1B.34b )
|
|
,
|
( 5.1B.34c )
|
|
.
|
( 5.1B.34d )
|
Soustavu N rovnic (5.1B.33) je možné s uvážením (5.1B.18) až (5.1B.21) a (5.1B.23) až (5.1B.32) přepsat do maticové rovnice
|
,
|
( 5.1B.35 )
|
kde |
,
|
( 5.1B.36a )
|
|
,
|
( 5.1B.36b )
|
|
,
|
( 5.1B.36c )
|
|
.
|
( 5.1B.36d )
|
Hranatými závorkami v (5.1B.35) označujeme matici velikosti NxN a složenými závorkami vektor o velikosti Nx1. Z (5.1B.35) je zřejmé, že levá strana rovnice obsahuje jen neznámé proudy v časových okamžicích t=tk, kdežto pravá strana obsahuje známé proudy v časech t±tk-1. Algoritmus může začít s předpokladem, že {I(m, t0)}={0} a výpočtem {I(m, t1)}. Když jsou vypočteny proudy {I(m,t1)}, tak pak je možné počítat {I(m,t2)}, atd. Dále je nutné poznamenat, že při řešení soustavy rovnic (5.1B.35) je nutno
jednou řešit inverzní matici (její členy jsou časově nezávislé). Výhodou je, že
matice je řídká.
Použití implicitního algoritmu je demonstrováno ve vrstvě A na analýze drátového dipólu. Numerický model buzení antén Vraťme se ještě k buzení naší drátové antény a diskutujme, jak můžeme nejvhodněji vytvořit numerický model buzení. Jakákoliv anténa může obecně pracovat buď v přijímacím, nebo ve
vysílacím módu. Předpokládejme, že svorky naší antény jsou umístěny
v jedné z proudových buněk z1, z2, …, zN naší diskretizované drátové antény (obr. 5.1B.1); toto místo označme zf. Vzdálenost svorek antény je rovna délce diskretizačního elementu.
Pokud anténa pracuje v přijímacím módu, na její povrch dopadá rovinná elektromagnetická vlna, jejíž časový průběh může mít obecný
charakter; v našem případě je definována Gaussovým impulsem modulovaný
harmonickým signálem (5.1A.7). V závislosti na směru dopadu příchozí vlny
vzhledem k ose antény je časový průběh dopadající vlny v proudových
buňkách naší struktury z1, z2, …, zN časově zpožděn. Dopadající vlna indukuje v drátové anténě proud. Odezva
proudu v místě svorek antény může být zaznamenána v zf. Pokud požadujeme, aby anténa pracovala ve vysílacím módu,
je situace analogická situaci, která byla popsána v kapitole 4.1. Ve vysílacím módu je napěťový zdroj připojen ke svorkám antény v místě zf. Tento zdroj vyvolá budicí intenzitu elektrického pole na svorkách antény (v našem
případě je časový průběh dán Gaussovým impulsem modulovaný harmonickým signálem).
Vzhledem k tomu, že budicí zdroj je připojen jen v jednom místě (zf), v ostatních proudových buňkách bude intenzita budicího pole rovna nule.
|