Uživatelské nástroje
Toto je starší verze dokumentu!
Hra 2048
Zadání
Realizujte hru 2048 na kitu FRDM-KL25Z. Jednotlivá čísla budou reprezentovány barvou, která bude zobrazena pomocí matice RGB LED. Pro řízení pohybu využijte akcelerometr.
Úvod
Vznik hry
Hra 2048 vznika prakticky za jediný víkend. Devatenáctiletý mladík jménem Gabriele Cirulli naprogramoval tuto hru jako školní projekt. Z tohoto nápadu velmi rychle vznikl fenomén a podobně jako v případě Flappy Bird začaly hříčku 2048 během několika dnů hrát desítky milionů hráčů.
Popis hry
Cílem hry je spojit čísla dohromady (mocniny 2), s cílem dosáhnout konečného čísla '2048 ' na jednom čtverečku. Herní pole je mřížka 4×4 (16 čtverečků), je zobrazena na Obr.1. Na začátku hry máte dva čtverce (také nazývané dlaždice) s číslem 2 uvnitř.Když spojíte dvě dlaždice se stejným číslem, splynou do nové dlaždice s dvojnásobným číslem, než je původní: 2+2 = 4, 4+4 = 8, … 1024 1024 = 2048! Chcete-li přesunout dlaždice na herním poli, stačí si vybrat směr (nahoru, dolů, vpravo nebo vlevo). Všechny dlaždice se přesunou zvoleným směrem - efekt sesypání k jedné straně. Pokud jsou vedle sebe dvě stejné čísla tak se spojí. V jednom kole se ale čísla mohou spojovat pouze jednou. Např. pokud sesypeme řádek 2 2 2 2 smerem doleva, výsledkem bude 4 4 0 0, nikoliv 8 0 0 0. Dalším pravidlem je že se sesypou nejvyšším číslem směrem ke stěně. Např. řádek 4 4 4 0 se změní na 8 4 0 0 nikoliv na 4 8 0 0. Po sesypání se oběví nové číslo 2 na některém s volných políček. Pokud je herní pole naplněno, hra končí.
V počítači, stačí použít pouze 4 šipky na klávesnici. Na mobilním zařízení s dotykovým displejem přejedeme prstem požadovaným směrem.
Implementace pro RGB displej
Mojím záměrem bylo implementovat tuto hru na RGB displej. Na něm ale nejdou zobrazovat čísla, proto budou reprezentovány pomocí různých barev. Řízení směru pohybu je řízeno pomocí náklonu displeje (akcelerometru). Všechny pravidla zůstavají stejná jako u originální hry.
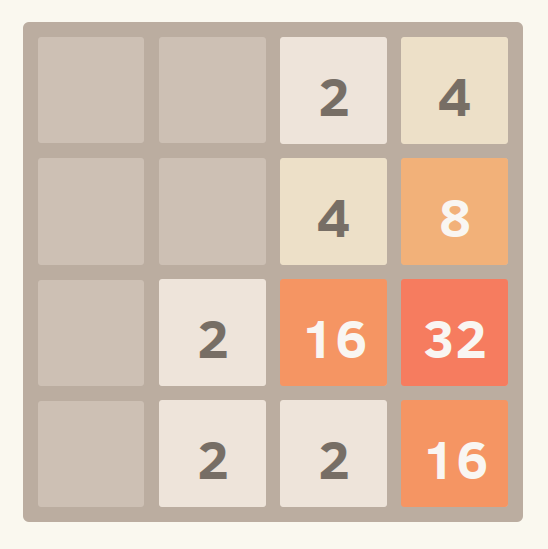
Obr.1 Ukázka ze hry 2048
Hardware
RGB matice LED je zapojena podle obrázku níže. Společným kontaktem pro každou RGB LED je anoda. Z toho vyplývá, že matice musí být spínána po řádcích tak, že je přivedeno kladné napětí na společnou anodu jednoho řádku a pomocí uzemění jednotlivých katod jsou rozsvěcovány jednotlivé LED.
K řízení RGB displeje nestačil samotný MCU ze dvou důvodů: 1. protože má pouze 3,3V logiku, která nestačí k bezepčnému rozsvícení LED (zejména modré) 2. každý pin omezený výstupní i vstupní proud na 4mA.
Z toho důvodu bylo potřeba vytvořit HW převodník, který převede 3,3V logiku na 5V a současně výkonově posílí výstupní piny. Pro spínání napětí +5V (high switch) bylo použito převodníku, který tvoří jeden NMOS a jeden PMOS. Pro spínání napětí 0V bylo použito tranzistorového pole ULN2803A. Kompletní zapojení převodníku je na Obr.2 níže.
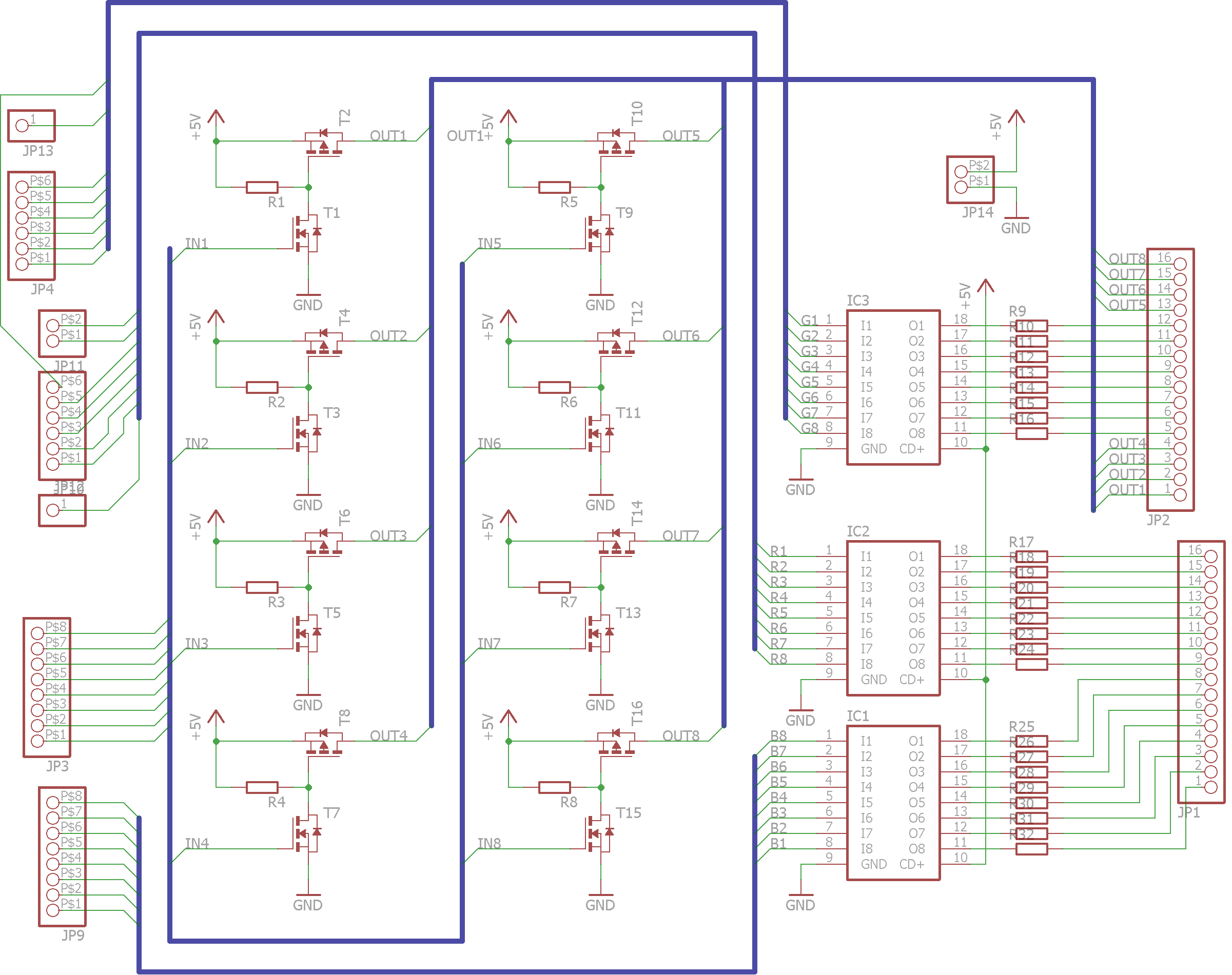
Obr.2 Schéma zapojení převodníku
Rozměr převodníku byl zvolen přesně podle rozměrů RGB matice LED a rozmístění součástek bylo voleno tak, aby se vešel nad kit FRDM-KL25Z. Deska byla vyráběna na ústavu UREL, proto nejsou použity klasické prokovy, místo nich je použito propojení drátkem. Převodník můžeme vidět na Obr.3 níže a soubory k jeho výrobě jsou v příloze k tohoto dokumentu.
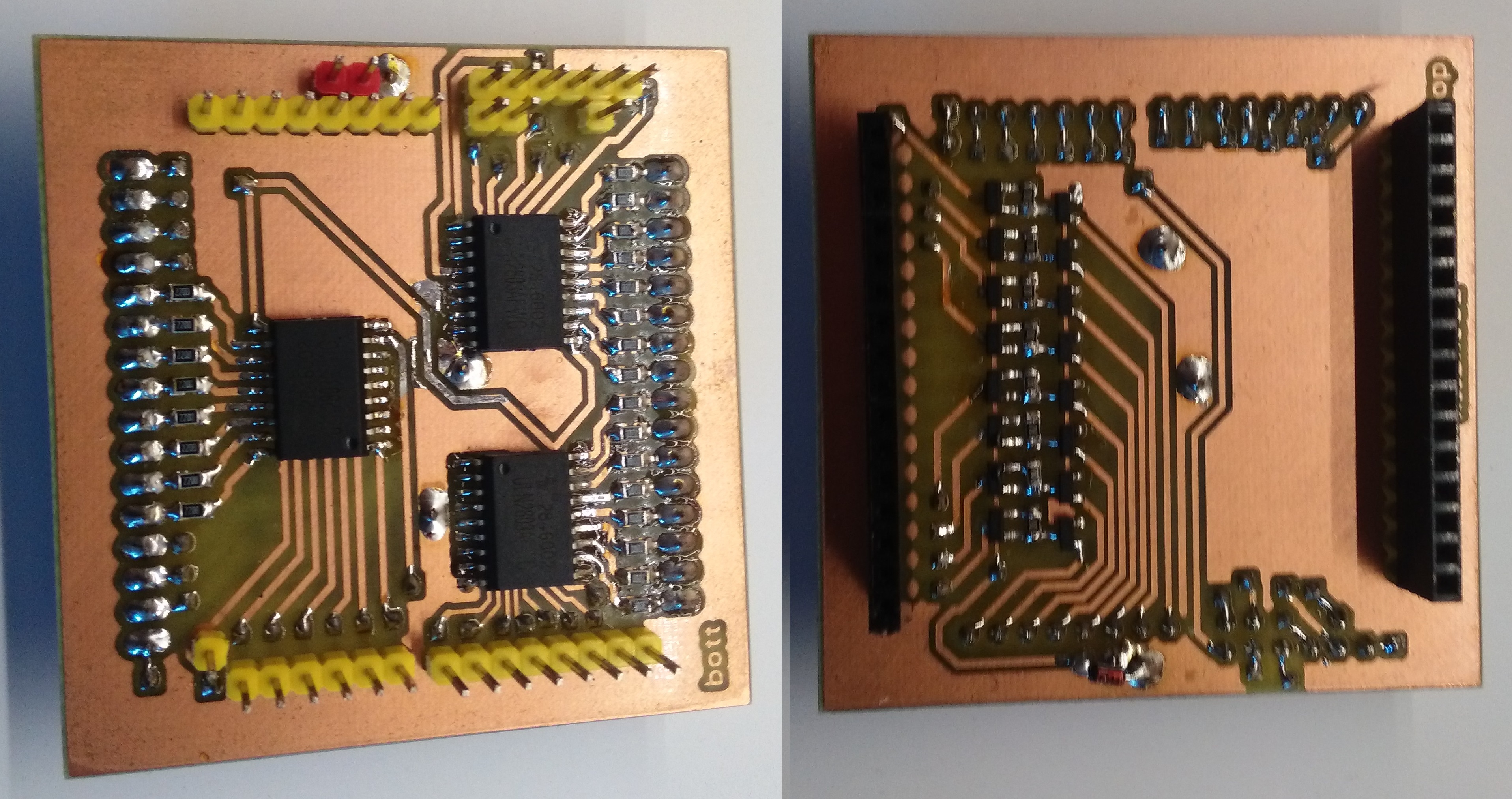
Obr.3 Osazený převodník
Software
Program byl psán ve vývojovém prostředí www.mbed.org. Celý kód je k dispozici v tomto odkazu https://developer.mbed.org/users/xlizne01/code/2048/
Funkce main
Ve funkci main dochází v nekonečné smyčce ke čtení dat z akcelerometru, detekci pohybu a také ke zobrazování aktuálních dat na RGB matici. Při spuštění jsou také přidány první 2 kostky na herní pole pomocí funkce pridej()
int main() { akcelerometr(); pridej(); pridej(); //přidání prvních dvou kostek while(1) // nekonečná smyčka pro detekci pohybu a zobrazování aktuální matice { akcelerometr(); pohyb(); zobrazeni(); } }
Funkce pohyb
void pohyb() { switch(naklon) { case 'D': //pohyb smerem dolu if(p==0) { sesypej(1); p=1; } break; case 'R': // pohyb smerem vpravo if(p==0) { sesypej(2); p=1; } break; case 'U': // pohyb smerem nahoru if(p==0) { sesypej(3); p=1; } break; case 'L': // pohyb smerem vlevo if(p==0) { sesypej(4); p=1; } break; case '0': // detekovana nulova pozice p=0; break; default: break; } }
Funkce sesypej
void sesypej(int x) { int a,b,c,d; //pomocné proměnné pro uložení řádků/sloupců při sesypání int same=0; // pomocná proměnná for(int k=0;k<4;k++) { for(int l=0;l<4;l++) { pole2[k][l]=pole[k][l]; //uložení původní matice do pomocné matice } } for(int n=0;n<4;n++) { if(x==1) // dolu { a=pole[n][0]; b=pole[n][1]; c=pole[n][2]; d=pole[n][3]; } if(x==2) // vpravo { a=pole[3][n]; b=pole[2][n]; c=pole[1][n]; d=pole[0][n]; } if(x==3) // nahoru { a=pole[n][3]; b=pole[n][2]; c=pole[n][1]; d=pole[n][0]; } if(x==4) // vlevo { a=pole[0][n]; b=pole[1][n]; c=pole[2][n]; d=pole[3][n]; } //sesypani if(a==0) {a=b; b=c; c=d; d=0;} if(a==0) {a=b; b=c; c=d; d=0;} if(a==0) {a=b; b=c; c=d; d=0;} if(b==0) {b=c; c=d; d=0;} if(b==0) {b=c; c=d; d=0;} if(c==0) {c=d; d=0;} //spojeni if(a==b) {a=2*a; b=c; c=d; d=0;} if(b==c) {b=2*b; c=d; d=0;} if(c==d) {c=2*c; d=0;} if(x==1) // dolu { pole[n][0]=a; pole[n][1]=b; pole[n][2]=c; pole[n][3]=d; } if(x==2) // vpravo { pole[3][n]=a; pole[2][n]=b; pole[1][n]=c; pole[0][n]=d; } if(x==3) // nahoru { pole[n][3]=a; pole[n][2]=b; pole[n][1]=c; pole[n][0]=d; } if(x==4) // vlevo { pole[0][n]=a; pole[1][n]=b; pole[2][n]=c; pole[3][n]=d; } } for(int q=0;q<4;q++) { for(int w=0;w<4;w++) { if (pole2[q][w]!=pole[q][w]) //kontrola, že došlo k nějaké změně v matici { same=1; } } } if(same==1) { pridej(); } }
Funkce pridej
void pridej() { int g=1; // pomocná proměnná int f; // nahodne cislo v rozmezi 0-15 sloužící ke generování náhodnách souřadnic while(g==1) { f =(rand()+int(xAngle)+int(yAngle))%16; if(pole[f/4][f%4]==0) { if((rand()+int(xAngle)+int(yAngle))%10==1) // reprezentuje 10% šanci, že přidá číslo 4 { pole[f/4][f%4]=4; g=0; } else // přidání čísla 2 { pole[f/4][f%4]=2; g=0; } } } }
Funkce zobrazeni
void zobrazeni() { int RledA, RledB, GledA, GledB, BledA, BledB; for(int k=0;k<4;k++) { prvni=0; druhy=0; treti=0; ctvrty=0; paty=0; sesty=0; sedmy=0; osmy=0; wait(0.00005); //opatreni proti tzv. duchum if(k==0) { prvni=1; druhy=1; } if(k==1) { treti=1; ctvrty=1; } if(k==2) { paty=1; sesty=1; } if(k==3) { sedmy=1; osmy=1; } for(int j=0;j<4;j++) { barva(j,k); for(int i=11;i>0;i--) { if(RED>0) { RledA=1; RledB=1; } else { RledA=0; RledB=0; } if(GREEN>0) { GledA=1; GledB=1; } else { GledA=0; GledB=0; } if(BLUE>0) { BledA=1; BledB=1; } else { BledA=0; BledB=0; } if(j==0) { Rled1=RledA; Rled2=RledB; Gled1=GledA; Gled2=GledB; Bled1=BledA; Bled2=BledB; } if(j==1) { Rled3=RledA; Rled4=RledB; Gled3=GledA; Gled4=GledB; Bled3=BledA; Bled4=BledB; } if(j==2) { Rled5=RledA; Rled6=RledB; Gled5=GledA; Gled6=GledB; Bled5=BledA; Bled6=BledB; } if(j==3) { Rled7=RledA; Rled8=RledB; Gled7=GledA; Gled8=GledB; Bled7=BledA; Bled8=BledB; } wait(0.00001); RED--; BLUE--; GREEN--; } } } }
Funkce barva
void barva(int k , int l) { if(pole[k][l]==0) { RED=0; GREEN=0; BLUE=0; } if(pole[k][l]==2) { RED=1; GREEN=0; BLUE=0; } if(pole[k][l]==4) { RED=10; GREEN=0; BLUE=0; } if(pole[k][l]==8) { RED=0; GREEN=0; BLUE=2; } if(pole[k][l]==16) { RED=0; GREEN=0; BLUE=10; } if(pole[k][l]==32) { RED=0; GREEN=2; BLUE=0; } if(pole[k][l]==64) { RED=0; GREEN=10; BLUE=0; } if(pole[k][l]==128) { RED=0; GREEN=10; BLUE=10; } if(pole[k][l]==256) { RED=10; GREEN=0; BLUE=10; } if(pole[k][l]==512) { RED=10; GREEN=10; BLUE=0; } if(pole[k][l]==1024) { RED=2; GREEN=2; BLUE=2; } if(pole[k][l]==2048) { RED=10; GREEN=10; BLUE=10; } RED=RED*BRIGHTNESS/10; GREEN=GREEN*BRIGHTNESS/10; BLUE=BLUE*BRIGHTNESS/10; }
Funkce akcelerometr
void akcelerometr() { float ax, ay, az; ax = acc.getAccX(); ay = acc.getAccY(); az = acc.getAccZ(); xAngle = atan( ax / (sqrt((ay)*(ay) + (az)*(az)))) * 60; yAngle = atan( ay / (sqrt((ax)*(ax) + (az)*(az)))) * 60; if((abs(xAngle)+abs(yAngle))<NULL_ANGLE) { naklon = '0'; // 0 nula } if(abs(xAngle) >= abs(yAngle)) { if(xAngle >= MOVE_ANGLE) { naklon = 'U'; // +X up } if(xAngle <= -MOVE_ANGLE) { naklon = 'D'; // -X down } } else { if(yAngle >= MOVE_ANGLE) { naklon = 'L'; // +Y left } if(yAngle <= -MOVE_ANGLE) { naklon = 'R'; // -Y right } } }