(2.1)
2 Základní pojmy - příklady
Význam základních pojmů optimalizace budeme ilustrovat dvěma konkrétními příklady z oblasti elektrotechniky. Prvním příkladem je optimalizace symetrického dipólu, druhým příkladem je optimalizace vlnovodu s příčným profilem ve tvaru H.
2.1 Symetrický dipól
Vlastnosti symetrického dipólu (obr. 2.1) na zadaném kmitočtu f jsou dány jeho délkou l a poloměrem anténního vodiče a. Tyto proměnné jsou tedy proměnnými stavovými, z nichž sestavíme stavový vektor z dvojrozměrného reálného prostoru
|
(2.1)
|
Vlastnosti symetrického dipólu budeme posuzovat z hlediska vstupního odporu R(l, a) a vstupní reaktance X(l, a). Při optimalizaci tedy budeme měnit délku a poloměr anténního vodiče tak, abychom dosáhli požadované hodnoty Rd a Xd. Kriteriální funkci tedy můžeme vyjádřit vztahem
|
(2.2)
|
Čím menší bude hodnota kriteriální funkce, tím blíže budou aktuální
hodnoty vstupního odporu a vstupní reaktance hodnotám požadovaným.
Ze vztahu (2.2) je rovněž vidět, proč rozdíly aktuálních a požadovaných
hodnot vstupních parametrů umocňujeme. V opačném případě (bez umocnění)
by mohl být velký kladný rozdíl odporů kompenzován velkým záporným
rozdílem reaktancí a hodnota kriteriální funkce by nabývala malé
hodnoty i v případě, kdy se nacházíme daleko od
optima.
Pokud bychom chtěli kriteriální funkci (2.2) zařadit z hlediska klasifikace
optimalizačních problémů, jak bylo
uvedeno ve vrstvě A, bude se jednat o součet čtverců nelineárních
funkcí (závislost vstupního odporu a vstupní reaktance na rozměrech
dipólu je nelineární).
Při hledání takových rozměrů dipólu, který bude mít na daném kmitočtu
vstupní impedanci, jež je v ideálním případě rovna vstupní impedanci
požadované, minimalizujeme kriteriální funkci (2.2)
|
(2.3)
|
Jelikož rozměry a a l nemohou být záporné, doplníme neomezenou optimalizaci (2.3) omezujícími podmínkami
|
(2.4a)
|
Tyto podmínky nazýváme prostým omezením nerovností (viz klasifikace
omezujících podmínek ve vrstvě A).
Aby si anténa uchovala charakter dipólu, musí být délka antény l
mnohem větší než poloměr vodiče a (v opačném případě bychom
dostali deskový kondenzátor s kruhovým tvarem elektrod). Požadujeme-li
alespoň 100-krát větší délku antény vzhledem k poloměru vodiče, musíme
přidat další omezující podmínku
|
(2.4b)
|
Podmínku (2.4b) můžeme klasifikovat jako omezení lineární
nerovností. Přípustná oblast optimalizace, vymezená podm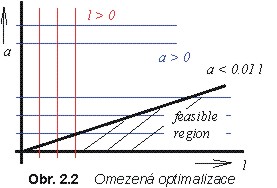 ínkami (2.4),
je vyznačena na obr. 2.2. Optimální hodnoty stavových proměnných a
a l tedy nehledáme v celé rovině [a, l],
ale omezujeme se pouze na šrafovaný klínový výřez. Tím jsme podstatně
zmenšili oblast, kterou při hledání optima prohledáváme.
ínkami (2.4),
je vyznačena na obr. 2.2. Optimální hodnoty stavových proměnných a
a l tedy nehledáme v celé rovině [a, l],
ale omezujeme se pouze na šrafovaný klínový výřez. Tím jsme podstatně
zmenšili oblast, kterou při hledání optima prohledáváme.
Další omezení, jímž bychom přípustnou oblast ohraničili na oblast
konečných rozměrů, by spočívala v definování maximálních možných
rozměrů, jichž anténa může nabývat. Tato omezení zde však pro
jednoduchost již neuvádíme.
Nyní se pokusíme celý náš optimalizační problém přepsat do maticového
tvaru, který bude odpovídat vztahům (2.4) v základní vrstvě.
Prostá omezení (2.4a) můžeme vyjádřit vztahy
|
(2.5a)
|
Lineární omezení (2.4b) pak můžeme přepsat do tvaru
|
(2.5b)
|
Jelikož naše omezení jsou lineární, mají funkce c1, c2
a c3 charakter vektorů
koeficientů c1
= [0, 1], c2 =
[1, 0] a c3 =
[0.01, -1] .
Tím je náš první příklad u konce mělo by z něj být zřejmé, jaký je
konkrétní význam základních pojmů z oblasti optimalizace.
2.2 Kovový vlnovod s profilem H
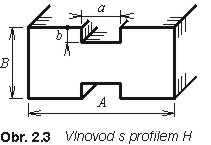 Nyní si všechny kroky, popsané v
odstavci 2.1, zopakujeme pro formulaci optimalizace dutého kovového
vlnovodu s příčným profilem ve tvaru písmene H (obr. 2.3). Pro
jednoduchost budeme předpokládat, že vlnovod je vyroben z dokonalého
elektrického vodiče (PEC, perfect electric conductor) a že
uvnitř vlnovodu je vakuum. Dále předpokládáme, že vlnovod je nekonečně
dlouhý a jeho parametry se v podélném směru nemění (říkáme, že vlnovod
je podélně homogenní). Vnější rozměry vlnovodu jsou shodné s rozměry
vlnovodu R100, tj. A = 22,86 mm a B = 10,16 mm. Při
optimalizaci budeme měnit šířku prolisu a a jeho výšku b
tak, abychom dosáhli jednovidovosti vlnovodu v předepsaném pásmu
kmitočtů. Pásmo jednovidovosti je dáno kritickým kmitočtem dominantního
vidu TE10 (od této frekvence se vlnovodem začíná šířit
elektromagnetická vlna) a kritickým kmitočtem druhého vyššího vidu TE20
(od této frekvence se vlnovodem začínají šířit různou rychlostí dvě
vlny, které se vzájemně skládají).
Nyní si všechny kroky, popsané v
odstavci 2.1, zopakujeme pro formulaci optimalizace dutého kovového
vlnovodu s příčným profilem ve tvaru písmene H (obr. 2.3). Pro
jednoduchost budeme předpokládat, že vlnovod je vyroben z dokonalého
elektrického vodiče (PEC, perfect electric conductor) a že
uvnitř vlnovodu je vakuum. Dále předpokládáme, že vlnovod je nekonečně
dlouhý a jeho parametry se v podélném směru nemění (říkáme, že vlnovod
je podélně homogenní). Vnější rozměry vlnovodu jsou shodné s rozměry
vlnovodu R100, tj. A = 22,86 mm a B = 10,16 mm. Při
optimalizaci budeme měnit šířku prolisu a a jeho výšku b
tak, abychom dosáhli jednovidovosti vlnovodu v předepsaném pásmu
kmitočtů. Pásmo jednovidovosti je dáno kritickým kmitočtem dominantního
vidu TE10 (od této frekvence se vlnovodem začíná šířit
elektromagnetická vlna) a kritickým kmitočtem druhého vyššího vidu TE20
(od této frekvence se vlnovodem začínají šířit různou rychlostí dvě
vlny, které se vzájemně skládají).
Kriteriální funkci budeme formulovat jako součet čtverců rozdílů mezi
aktuální hodnotou kritického kmitočtu vidu TE10 f10(a, b) a hodnotou
požadovanou f10,d,
a dále mezi aktuální hodnotou kritického vidu TE20 f20(a, b) a hodnotou
požadovanou f20,d
|
(2.6)
|
Z hlediska klasifikace se opět jedná o součet čtverů nelineárních
funkcí.
Kriteriální funkci budeme minimalizovat vzhledem k rozměrům prolisu a,
b
|
(2.7)
|
Z rozměrů prolisu sestavíme stavový vektor
|
(2.8)
|
Minimum kriteriální funkce tedy budeme opět hledat ve dvojrozměrném reálném stavovém prostoru, nyní [a, b]. Stavový prostor však musíme stejně jako u dipólu omezit. Šířku prolisu a budeme měnit od hodnoty 0 mm (vlnovod nemá žádný prolis) do hodnoty 18 mm (nožička písmene H je tlustá 4,86 mm). Výšku prolisu b měníme od hodnoty 0 mm (bez prolisu) do hodnoty 4 mm (tloušťka příčky v písmenu H je 2,16 mm). Dostáváme tedy prostá omezení, která můžeme v maticové formě vyjádřit vztahy
|
(2.9)
|
V případě vlnovodu s příčným profilem ve tvaru písmene H tedy
hledáme minimum kriteriální funkce (2.6) v obdélníkové přípustné
oblasti o konečné ploše 18 mm x 4 mm.
Tím je formulace optimalizačního problému hotova. Nyní stačí
vybrat vhodnou metodu minimalizace a najít v přípustné oblasti optimum.
O metodách neomezené optimalizace (tj. minimalizace bez omezujících
podmínek) pojednává 4. kapitola.